工业机器人协同研发制造解决方案
合作方式:技术服务
所属行业:
解决方案覆盖内容如下:
●支持工业机器人的全三维设计过程;
●支持工业机器人运动学仿真、动力学仿真、静力学仿真、电机选型等功能;
●支持三维轻量化协同功能,搭建机器人设计知识库,提升机器人设计和管理能 力,大幅提高产品设计质量和效率;
●支持项目管理、设计流程管理、产品数据管理、三维工艺规划与制造管理等功 能;
●支持在线发布新闻动态、技术服务、供需发布、社区交流、活动展示、软件服 务等功能。
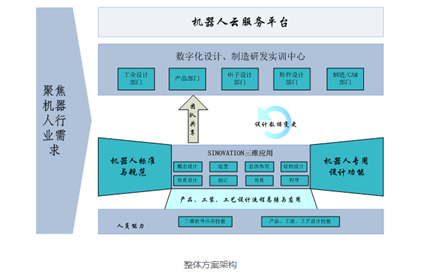
机器人专用设计平台
SINOVATION是体现国际最先进设计制造水平的自主版权三维CAD/CAM软件,可以 实现机器人的三维建模、装配、出图等操作。
●提供特征造型、参数化设计、混合建模、直接建模等功能,实现机器人零部件 快速设计;
●高效快捷的装配操作、干涉检查、实时的装配评价与运动模拟,实现机器人整 体的快速装配;
●易操作的工程图创建功能,提供剖视图、BOM表快速创建等功能。
机器人专用仿真平台
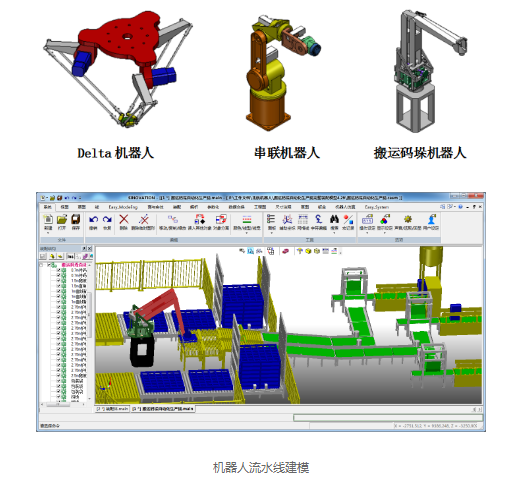
机器人仿真的任务是在不接触实际机器人及其工作环境的情况下,通过计算机 图形技术提供机器人进行交互作用的虚拟环境。在设计阶段对运动轨迹进行模 拟并计算运动过程中各关节的力矩等参数,进而完成电机、减速器的选型,可 以有效避免机器人与环境干涉、运动不可达、电机参数不合适等问题。机器人 专用仿真平台可以实现Delta机器人、串联机器人、搬运码垛机器人等机器人的 运动学仿真、动力学仿真、静力学仿真等功能。
机器人模型库:包含了三种常用的机器人:串联机器人、Delta机器人以及码垛 机器人,用户可根据自身需求自定义杆件长度参数等。
运动学仿真:用户可以通过鼠标拖拽,改变机器人各关节的自由度、从而改变 机器人的姿态,根据自身需要定义机器人运动轨迹并使机器人按照所设定的轨 迹进行运动。
动力学仿真:用户可以定义运动轨迹,使机器人按照该轨迹仿真运行。软件集成Modelica,通 过计算仿真运行过程中各关节的力矩,实现电机、减速器选型。
静力学仿真:通过剖分分元对机器人零件进行网格划分,设置约束点、载荷点及受力大小, 进行求解计算,并通过云图显示的方式描述静力学分析结果。
机器人三维协同平台
SView是自主研发的浏览器产品,用于设计、制造及服务等产品生命周 期过程中进行三维轻量化浏览和评。SView可直接浏览主流CAD数据,支持PMI信 息、3D批注、三维工艺仿真、轻量化发布、网络会议、嵌入式部署等功能,并 可以实现与PDM、CAPP、MPM等系统的无缝集成。
机器人设计与制造管理平台
通过InforCenter管理平台,建立机器人产品协同研发环境,支持跨部门项目研 发协作,管理机器人研发项目的计划、执行、监控与反馈,控制项目任务交付 质量,实现工作流驱动的智能项目任务分发和可视化进度监控。建立基于 InforCenter系统的工作流程,提供规范的电子化流程执行手段,支持研发工作 流程模板的定义和建立,实现工程数据的电子化管理与发布,建立融合数模成 熟度的工程设计过程管理,涉及的流程范围包括:
●设计数据(3D/2D)审批流程;
●技术文件(设计任务书、立项报告)发布流程;
●标准规范文件生效/作废流程;
●对外数据发放审批流程;
●CAE分析报告发布流程;
●试验报告发布流程;
●项目工作流程;
●项目交付物流程。