找到31项技术成果数据。
找技术 >
四轴高速机器人
成熟度:正在研发
技术类型:-
应用行业:制造业
技术简介
p 成果与项目的背景及主要用途:随着与信息技术和网络技术的不断发展融合,工业机器人已由仅完成单项、 重复性操作任务的机械手逐步发展成为具有快速可重构、多功能、智能化等特征 的作业单元及大型自动化生产线,并随着技术的进步和市场的需求将在工业生产 中逐渐开始全面推广。技术原理与工艺流程简介:四轴高速机器人采用4-R(2-SS)型并联机构,其机械本体结构,包括固定平台、 私服驱动机构、支链和动平台四部分组成。1)主动膺2)球关节连接件3)从动皆连接销4)销端螺母5)从动膺技簧四条支链结构相同且轴对称均匀布置,其功能是用于传递驱动机构和动平台 间的运动。各零件的连接方式:主动臂1上端连接驱动机构的精密减速器输出法 兰轴,使主动臂的旋转角度与精密减速器输出法兰同步;另一端通过两个球关节6 分别连接两个相互平行的从动臂7,从动臂7两端带有球关节连接件2,与球关节 6之间通过从动臂连接销3和销端螺母4固定连接,相对应的销端螺母4上挂有从 动臂拉^ 5;所述支链主动臂采用工字型结构,以增强主动臂强度;所述支链从动 臂采用管型结构,材质为碳纤维高分子材料。四自由度高速并联机器人支链传递运动的实现:当精密减速器被伺服电机的 驱动旋转时,连接在精密减速器输出法兰上的主动臂1也被驱动进行同步旋转; 由从动臂7和球关节6组成的平行四边形机构将主动臂1末端的摆动传递给动平 台。性能参数如下:工作空间:C 1000mm*150mm, -180~180C700mm*100mm, -180~180加速度:100~200m/s2抓取频次:120-180picks/min定位精度:0.2mm/1重复精度:0.1mm/0.5应用领域:食品、医药、电子、新能源等行业中高速智能分选与包装合作方式及条件:具体面议 /p

一种二维转动动臂三维转动铲斗空间可控机构式装载机
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
本发明涉及一种二维转动动臂三维转动铲斗空间可控机构式装载机,包括车体、动臂、铲斗、五根主动杆、五根连杆和五台伺服电机,其动臂能实现独立的二维转动,铲斗能实现独立的三维转动,整个装载机能实现空间五活动度的运动输出。此种空间可控机构式装载机能有效克服液压装载机液压元件加工精度要求高、维修保养成本高、可靠度难保证、容易漏油等缺点,还能解决平面装载机只能实现平面内的轨迹输出,导致的动作不够灵活、工作空间有限、工作效率低等问题。
两活动度动臂一活动度斗杆两活动度铲斗空间挖掘机
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
两活动度动臂一活动度斗杆两活动度铲斗空间挖掘机,包括二维转动臂机构、一维转动斗杆机构和二维转动铲斗机构。所述二维转动臂机构包括二维转动臂、第一液压缸和第二液压缸,一维转动斗杆机构包括一维转动斗杆、第三液压缸,二维转动铲斗机构包括二维转动铲斗、第四液压缸和第五液压缸。此种新型挖掘机的动臂和铲斗均能实现独立的空间两维转动,整个挖掘机能实现空间五活动度的运动,机构输出轨迹灵活、工作空间大、工作效率高,能在环境恶劣、空间狭小的施工工地以及需要快速挖掘、清障、平整的突发事故救援现场能发挥较好作用。
一种液压挖掘机比例流量优先控制阀
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
一种液压挖掘机比例流量优先控制阀(专利号201310014338.8),包括阀体,柱塞,控制弹簧,顶杆,弹簧,阀芯。优先阀的A口接控制压力,阀芯上开有节流口。当回转与动臂提升复合动作时,系统根据回转的角度与动臂提升的高度来确定输入A口的压力,从而控制阀芯阀口的开度,使回转不同的角度,回转与动臂提升都能够协调。本装置由于能够比例的控制流入回转马达的流量,因此能够针对不同的回转角度与动臂提升高度的组合的复合动作,具有结构简单,性能稳定,使用寿命长等优点。
自装自卸散料汽车
成熟度:通过小试
技术类型:实用新型
应用行业:制造业
技术简介
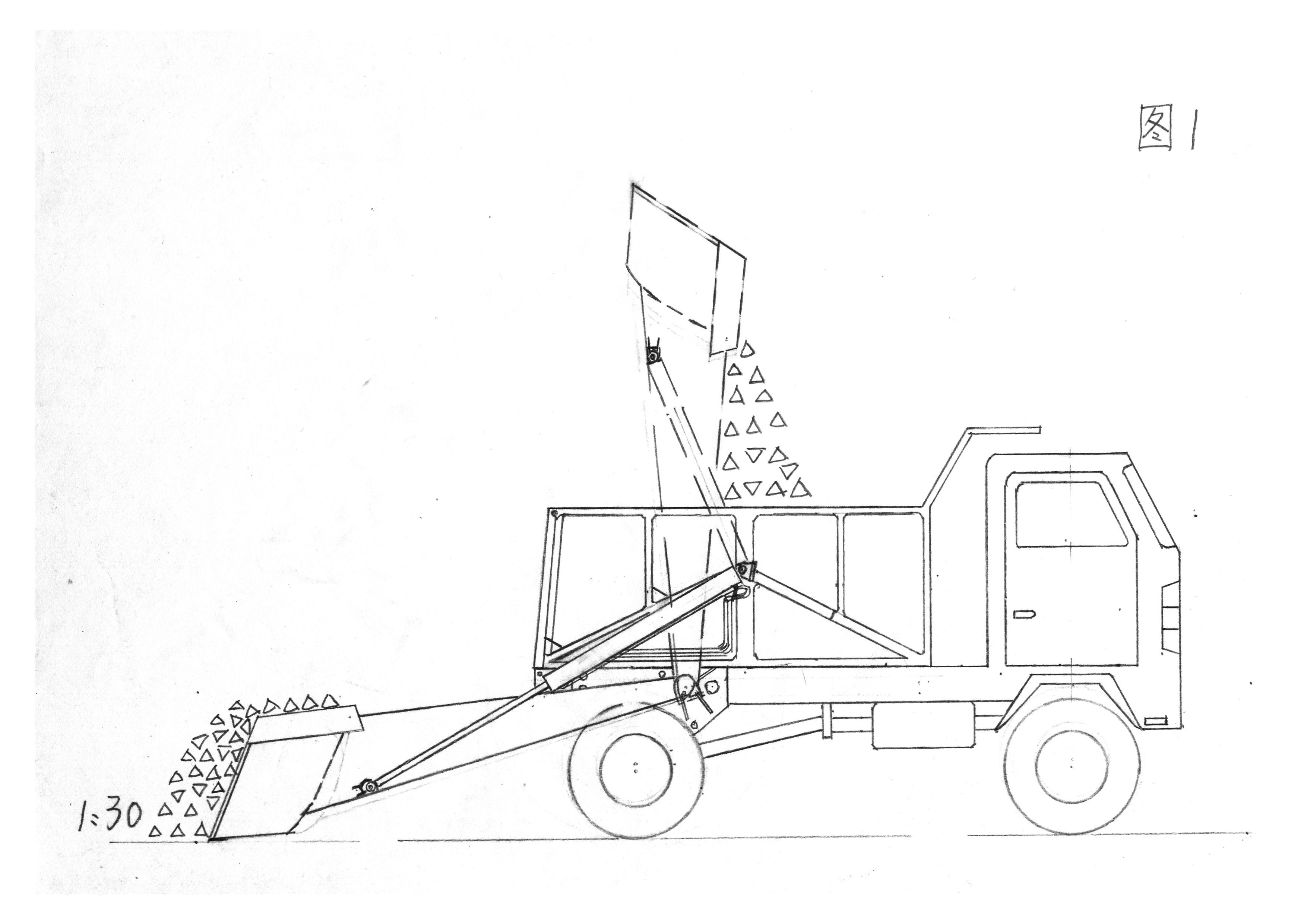
实用新型专利技术转让项目:自装自卸散料汽车专利号:ZL201120035332.5技术领域:本实用新型属汽车技术领域,涉及一种散料汽车,特别是自卸散料汽车。背景技术:现有技术的散料汽车,一般都只能自卸,而不能自己装车。装车时,需采用人工或雇用装载机,如果采用人工装车,费时费力,效率很低。如果雇用装载机装车,不仅费用高,而且也不能保证及时。发明内容:本实用新型的目的是提供一种自装自卸散料汽车,用以有效的克服现有技术自卸散料汽车所存在的上述缺陷。本实用新型的目的是在现有技术自卸散料汽车的基础上改进实现的,它包括车箱、车架以及驱动桥钢性连接机构。其特征在于它的车箱两侧都设有加强筋,两侧加强筋交会处都铰接装配有可由司机通过操纵杆操作控制的油缸;它还有一动臂铲斗,该动臂铲斗的两动臂端分别铰接于上述所说车架的两侧,上述所说车箱两侧油缸的连杆分别铰接于动臂铲斗动臂的前端部;在它的驱动桥与车架的连接部位,还加装了驱动桥支承外板和内板。
一种二维转动动臂二维转动铲斗空间可控机构式装载机
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
本实用新型涉及一种二维转动动臂二维转动铲斗空间可控机构式装载机,包括车体、动臂、铲斗、四根主动杆、四根连杆和四台伺服电机,其动臂能实现独立的二维转动,铲斗能实现独立的二维转动,整个装载机能实现空间四活动度的运动输出。此种空间可控机构式装载机能有效克服液压装载机液压元件加工精度要求高、维修保养成本高、可靠度难保证、容易漏油等缺点,还能解决平面装载机只能实现平面内的轨迹输出,导致的动作不够灵活、工作空间有限、工作效率低等问题。
平面多连杆可控挖掘机构
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
本发明公开了一种平面多连杆可控挖掘机构 平面多连杆可控挖掘机构包括:机架;第一控制支链,其包括:一端铰接于机架上的第一主动杆,一端与第一主动杆的另一端铰接的第二连杆,一端与第二连杆的另一端铰接的第一动臂;第二控制支链,其包括,一端铰接于机架上的第二主动杆,一端与第二主动杆的另一端铰接的第三连杆,一端与第三连杆的另一端铰接的第二动臂;翻转支链,其包括:一端铰接于机架上的第三主动杆,一端与第三主动杆的另一端铰接的翻转杆,该翻转杆的中部与第二动臂的中部铰接,翻转杆的另一端铰接于第一动臂的中部;以及铲斗,其上部与第一动臂的另一端铰接,下部与第二动臂的另一端铰接。该平面多连杆可控挖掘机构较灵活,能够避免液压元件精度高、漏油等缺点。
一维转动动臂三维转动铲斗空间可控机构式装载机
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
本发明涉及一种一维转动动臂三维转动铲斗空间可控机构式装载机,包括车体、动臂、铲斗、四根主动杆、四根连杆和四台伺服电机,其动臂能实现独立的一维转动,铲斗能实现独立的三维转动,整个装载机能实现空间四活动度的运动输出。此种空间可控机构式装载机能有效克服液压装载机液压元件加工精度要求高、维修保养成本高、可靠度难保证、容易漏油等缺点,还能解决平面装载机只能实现平面内的轨迹输出,导致的动作不够灵活、工作空间有限、工作效率低等问题。
一种自调式可控机构式微型多自由度装载机构
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
一种自调式可控机构式微型多自由度装载机构,包括机架、动臂、铲斗翻转支链、动臂抬升支链、铲斗。动臂铰接在机架上,另一端铰接铲斗,铲斗翻转支链由伺服电机驱动,控制铲斗翻转,动臂抬升支链在伺服电机的驱动下控制动臂起降,配合铲斗翻转支链完成装载作业。由于该可控装载机构由安装在机架上的伺服电机驱动,工作装置易实现自动化、数控化控制,该机构结构更简单、造价低,承载能力高,更加适合制造小型微型装载机,而且避免了液压装载机液压元件制造成本高、维护保养复杂等缺点,同时与其它可控装载机构相比由于采用横梁设计,避免了两台伺服电机同时驱动动臂时由于不同步而产生的卡死以及刚性破坏。
一种3-3-1型七活动度空间液压挖掘机
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
一种3-3-1型五活动度空间液压挖掘机,包括三维转动臂机构、三维转动斗杆机构和一维转动铲斗机构。所述三维转动臂机构包括三维转动臂、第一液压缸、第二液压缸和第三液压缸,三维转动斗杆机构包括三维转动斗杆、第四液压缸、第五液压缸和第六液压缸,一维转动铲斗机构包括一维转动铲斗、第七液压缸、第一连杆和第二连杆。此种新型挖掘机的动臂和斗杆均能实现独立的空间三维转动,整个挖掘机能实现空间七活动度的运动,机构输出轨迹灵活、工作空间大、工作效率高,能在环境恶劣、空间狭小的施工工地以及需要快速挖掘、清障、平整的突发事故救援现场能发挥较好作用。




找到31项技术成果数据。
找技术 >四轴高速机器人
成熟度:正在研发
技术类型:-
应用行业:制造业
技术简介
p 成果与项目的背景及主要用途:随着与信息技术和网络技术的不断发展融合,工业机器人已由仅完成单项、 重复性操作任务的机械手逐步发展成为具有快速可重构、多功能、智能化等特征 的作业单元及大型自动化生产线,并随着技术的进步和市场的需求将在工业生产 中逐渐开始全面推广。技术原理与工艺流程简介:四轴高速机器人采用4-R(2-SS)型并联机构,其机械本体结构,包括固定平台、 私服驱动机构、支链和动平台四部分组成。1)主动膺2)球关节连接件3)从动皆连接销4)销端螺母5)从动膺技簧四条支链结构相同且轴对称均匀布置,其功能是用于传递驱动机构和动平台 间的运动。各零件的连接方式:主动臂1上端连接驱动机构的精密减速器输出法 兰轴,使主动臂的旋转角度与精密减速器输出法兰同步;另一端通过两个球关节6 分别连接两个相互平行的从动臂7,从动臂7两端带有球关节连接件2,与球关节 6之间通过从动臂连接销3和销端螺母4固定连接,相对应的销端螺母4上挂有从 动臂拉^ 5;所述支链主动臂采用工字型结构,以增强主动臂强度;所述支链从动 臂采用管型结构,材质为碳纤维高分子材料。四自由度高速并联机器人支链传递运动的实现:当精密减速器被伺服电机的 驱动旋转时,连接在精密减速器输出法兰上的主动臂1也被驱动进行同步旋转; 由从动臂7和球关节6组成的平行四边形机构将主动臂1末端的摆动传递给动平 台。性能参数如下:工作空间:C 1000mm*150mm, -180~180C700mm*100mm, -180~180加速度:100~200m/s2抓取频次:120-180picks/min定位精度:0.2mm/1重复精度:0.1mm/0.5应用领域:食品、医药、电子、新能源等行业中高速智能分选与包装合作方式及条件:具体面议 /p
一种二维转动动臂三维转动铲斗空间可控机构式装载机
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
本发明涉及一种二维转动动臂三维转动铲斗空间可控机构式装载机,包括车体、动臂、铲斗、五根主动杆、五根连杆和五台伺服电机,其动臂能实现独立的二维转动,铲斗能实现独立的三维转动,整个装载机能实现空间五活动度的运动输出。此种空间可控机构式装载机能有效克服液压装载机液压元件加工精度要求高、维修保养成本高、可靠度难保证、容易漏油等缺点,还能解决平面装载机只能实现平面内的轨迹输出,导致的动作不够灵活、工作空间有限、工作效率低等问题。
两活动度动臂一活动度斗杆两活动度铲斗空间挖掘机
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
两活动度动臂一活动度斗杆两活动度铲斗空间挖掘机,包括二维转动臂机构、一维转动斗杆机构和二维转动铲斗机构。所述二维转动臂机构包括二维转动臂、第一液压缸和第二液压缸,一维转动斗杆机构包括一维转动斗杆、第三液压缸,二维转动铲斗机构包括二维转动铲斗、第四液压缸和第五液压缸。此种新型挖掘机的动臂和铲斗均能实现独立的空间两维转动,整个挖掘机能实现空间五活动度的运动,机构输出轨迹灵活、工作空间大、工作效率高,能在环境恶劣、空间狭小的施工工地以及需要快速挖掘、清障、平整的突发事故救援现场能发挥较好作用。
一种液压挖掘机比例流量优先控制阀
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
一种液压挖掘机比例流量优先控制阀(专利号201310014338.8),包括阀体,柱塞,控制弹簧,顶杆,弹簧,阀芯。优先阀的A口接控制压力,阀芯上开有节流口。当回转与动臂提升复合动作时,系统根据回转的角度与动臂提升的高度来确定输入A口的压力,从而控制阀芯阀口的开度,使回转不同的角度,回转与动臂提升都能够协调。本装置由于能够比例的控制流入回转马达的流量,因此能够针对不同的回转角度与动臂提升高度的组合的复合动作,具有结构简单,性能稳定,使用寿命长等优点。
自装自卸散料汽车
成熟度:通过小试
技术类型:实用新型
应用行业:制造业
技术简介
实用新型专利技术转让项目:自装自卸散料汽车专利号:ZL201120035332.5技术领域:本实用新型属汽车技术领域,涉及一种散料汽车,特别是自卸散料汽车。背景技术:现有技术的散料汽车,一般都只能自卸,而不能自己装车。装车时,需采用人工或雇用装载机,如果采用人工装车,费时费力,效率很低。如果雇用装载机装车,不仅费用高,而且也不能保证及时。发明内容:本实用新型的目的是提供一种自装自卸散料汽车,用以有效的克服现有技术自卸散料汽车所存在的上述缺陷。本实用新型的目的是在现有技术自卸散料汽车的基础上改进实现的,它包括车箱、车架以及驱动桥钢性连接机构。其特征在于它的车箱两侧都设有加强筋,两侧加强筋交会处都铰接装配有可由司机通过操纵杆操作控制的油缸;它还有一动臂铲斗,该动臂铲斗的两动臂端分别铰接于上述所说车架的两侧,上述所说车箱两侧油缸的连杆分别铰接于动臂铲斗动臂的前端部;在它的驱动桥与车架的连接部位,还加装了驱动桥支承外板和内板。
一种二维转动动臂二维转动铲斗空间可控机构式装载机
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
本实用新型涉及一种二维转动动臂二维转动铲斗空间可控机构式装载机,包括车体、动臂、铲斗、四根主动杆、四根连杆和四台伺服电机,其动臂能实现独立的二维转动,铲斗能实现独立的二维转动,整个装载机能实现空间四活动度的运动输出。此种空间可控机构式装载机能有效克服液压装载机液压元件加工精度要求高、维修保养成本高、可靠度难保证、容易漏油等缺点,还能解决平面装载机只能实现平面内的轨迹输出,导致的动作不够灵活、工作空间有限、工作效率低等问题。
平面多连杆可控挖掘机构
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
本发明公开了一种平面多连杆可控挖掘机构 平面多连杆可控挖掘机构包括:机架;第一控制支链,其包括:一端铰接于机架上的第一主动杆,一端与第一主动杆的另一端铰接的第二连杆,一端与第二连杆的另一端铰接的第一动臂;第二控制支链,其包括,一端铰接于机架上的第二主动杆,一端与第二主动杆的另一端铰接的第三连杆,一端与第三连杆的另一端铰接的第二动臂;翻转支链,其包括:一端铰接于机架上的第三主动杆,一端与第三主动杆的另一端铰接的翻转杆,该翻转杆的中部与第二动臂的中部铰接,翻转杆的另一端铰接于第一动臂的中部;以及铲斗,其上部与第一动臂的另一端铰接,下部与第二动臂的另一端铰接。该平面多连杆可控挖掘机构较灵活,能够避免液压元件精度高、漏油等缺点。
一维转动动臂三维转动铲斗空间可控机构式装载机
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
本发明涉及一种一维转动动臂三维转动铲斗空间可控机构式装载机,包括车体、动臂、铲斗、四根主动杆、四根连杆和四台伺服电机,其动臂能实现独立的一维转动,铲斗能实现独立的三维转动,整个装载机能实现空间四活动度的运动输出。此种空间可控机构式装载机能有效克服液压装载机液压元件加工精度要求高、维修保养成本高、可靠度难保证、容易漏油等缺点,还能解决平面装载机只能实现平面内的轨迹输出,导致的动作不够灵活、工作空间有限、工作效率低等问题。
一种自调式可控机构式微型多自由度装载机构
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
一种自调式可控机构式微型多自由度装载机构,包括机架、动臂、铲斗翻转支链、动臂抬升支链、铲斗。动臂铰接在机架上,另一端铰接铲斗,铲斗翻转支链由伺服电机驱动,控制铲斗翻转,动臂抬升支链在伺服电机的驱动下控制动臂起降,配合铲斗翻转支链完成装载作业。由于该可控装载机构由安装在机架上的伺服电机驱动,工作装置易实现自动化、数控化控制,该机构结构更简单、造价低,承载能力高,更加适合制造小型微型装载机,而且避免了液压装载机液压元件制造成本高、维护保养复杂等缺点,同时与其它可控装载机构相比由于采用横梁设计,避免了两台伺服电机同时驱动动臂时由于不同步而产生的卡死以及刚性破坏。
一种3-3-1型七活动度空间液压挖掘机
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
一种3-3-1型五活动度空间液压挖掘机,包括三维转动臂机构、三维转动斗杆机构和一维转动铲斗机构。所述三维转动臂机构包括三维转动臂、第一液压缸、第二液压缸和第三液压缸,三维转动斗杆机构包括三维转动斗杆、第四液压缸、第五液压缸和第六液压缸,一维转动铲斗机构包括一维转动铲斗、第七液压缸、第一连杆和第二连杆。此种新型挖掘机的动臂和斗杆均能实现独立的空间三维转动,整个挖掘机能实现空间七活动度的运动,机构输出轨迹灵活、工作空间大、工作效率高,能在环境恶劣、空间狭小的施工工地以及需要快速挖掘、清障、平整的突发事故救援现场能发挥较好作用。
找到31项技术成果数据。
找技术 >四轴高速机器人
成熟度:正在研发
技术类型:-
应用行业:制造业
技术简介
p 成果与项目的背景及主要用途:随着与信息技术和网络技术的不断发展融合,工业机器人已由仅完成单项、 重复性操作任务的机械手逐步发展成为具有快速可重构、多功能、智能化等特征 的作业单元及大型自动化生产线,并随着技术的进步和市场的需求将在工业生产 中逐渐开始全面推广。技术原理与工艺流程简介:四轴高速机器人采用4-R(2-SS)型并联机构,其机械本体结构,包括固定平台、 私服驱动机构、支链和动平台四部分组成。1)主动膺2)球关节连接件3)从动皆连接销4)销端螺母5)从动膺技簧四条支链结构相同且轴对称均匀布置,其功能是用于传递驱动机构和动平台 间的运动。各零件的连接方式:主动臂1上端连接驱动机构的精密减速器输出法 兰轴,使主动臂的旋转角度与精密减速器输出法兰同步;另一端通过两个球关节6 分别连接两个相互平行的从动臂7,从动臂7两端带有球关节连接件2,与球关节 6之间通过从动臂连接销3和销端螺母4固定连接,相对应的销端螺母4上挂有从 动臂拉^ 5;所述支链主动臂采用工字型结构,以增强主动臂强度;所述支链从动 臂采用管型结构,材质为碳纤维高分子材料。四自由度高速并联机器人支链传递运动的实现:当精密减速器被伺服电机的 驱动旋转时,连接在精密减速器输出法兰上的主动臂1也被驱动进行同步旋转; 由从动臂7和球关节6组成的平行四边形机构将主动臂1末端的摆动传递给动平 台。性能参数如下:工作空间:C 1000mm*150mm, -180~180C700mm*100mm, -180~180加速度:100~200m/s2抓取频次:120-180picks/min定位精度:0.2mm/1重复精度:0.1mm/0.5应用领域:食品、医药、电子、新能源等行业中高速智能分选与包装合作方式及条件:具体面议 /p
一种二维转动动臂三维转动铲斗空间可控机构式装载机
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
本发明涉及一种二维转动动臂三维转动铲斗空间可控机构式装载机,包括车体、动臂、铲斗、五根主动杆、五根连杆和五台伺服电机,其动臂能实现独立的二维转动,铲斗能实现独立的三维转动,整个装载机能实现空间五活动度的运动输出。此种空间可控机构式装载机能有效克服液压装载机液压元件加工精度要求高、维修保养成本高、可靠度难保证、容易漏油等缺点,还能解决平面装载机只能实现平面内的轨迹输出,导致的动作不够灵活、工作空间有限、工作效率低等问题。
两活动度动臂一活动度斗杆两活动度铲斗空间挖掘机
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
两活动度动臂一活动度斗杆两活动度铲斗空间挖掘机,包括二维转动臂机构、一维转动斗杆机构和二维转动铲斗机构。所述二维转动臂机构包括二维转动臂、第一液压缸和第二液压缸,一维转动斗杆机构包括一维转动斗杆、第三液压缸,二维转动铲斗机构包括二维转动铲斗、第四液压缸和第五液压缸。此种新型挖掘机的动臂和铲斗均能实现独立的空间两维转动,整个挖掘机能实现空间五活动度的运动,机构输出轨迹灵活、工作空间大、工作效率高,能在环境恶劣、空间狭小的施工工地以及需要快速挖掘、清障、平整的突发事故救援现场能发挥较好作用。
一种液压挖掘机比例流量优先控制阀
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
一种液压挖掘机比例流量优先控制阀(专利号201310014338.8),包括阀体,柱塞,控制弹簧,顶杆,弹簧,阀芯。优先阀的A口接控制压力,阀芯上开有节流口。当回转与动臂提升复合动作时,系统根据回转的角度与动臂提升的高度来确定输入A口的压力,从而控制阀芯阀口的开度,使回转不同的角度,回转与动臂提升都能够协调。本装置由于能够比例的控制流入回转马达的流量,因此能够针对不同的回转角度与动臂提升高度的组合的复合动作,具有结构简单,性能稳定,使用寿命长等优点。
自装自卸散料汽车
成熟度:通过小试
技术类型:实用新型
应用行业:制造业
技术简介
实用新型专利技术转让项目:自装自卸散料汽车专利号:ZL201120035332.5技术领域:本实用新型属汽车技术领域,涉及一种散料汽车,特别是自卸散料汽车。背景技术:现有技术的散料汽车,一般都只能自卸,而不能自己装车。装车时,需采用人工或雇用装载机,如果采用人工装车,费时费力,效率很低。如果雇用装载机装车,不仅费用高,而且也不能保证及时。发明内容:本实用新型的目的是提供一种自装自卸散料汽车,用以有效的克服现有技术自卸散料汽车所存在的上述缺陷。本实用新型的目的是在现有技术自卸散料汽车的基础上改进实现的,它包括车箱、车架以及驱动桥钢性连接机构。其特征在于它的车箱两侧都设有加强筋,两侧加强筋交会处都铰接装配有可由司机通过操纵杆操作控制的油缸;它还有一动臂铲斗,该动臂铲斗的两动臂端分别铰接于上述所说车架的两侧,上述所说车箱两侧油缸的连杆分别铰接于动臂铲斗动臂的前端部;在它的驱动桥与车架的连接部位,还加装了驱动桥支承外板和内板。
一种二维转动动臂二维转动铲斗空间可控机构式装载机
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
本实用新型涉及一种二维转动动臂二维转动铲斗空间可控机构式装载机,包括车体、动臂、铲斗、四根主动杆、四根连杆和四台伺服电机,其动臂能实现独立的二维转动,铲斗能实现独立的二维转动,整个装载机能实现空间四活动度的运动输出。此种空间可控机构式装载机能有效克服液压装载机液压元件加工精度要求高、维修保养成本高、可靠度难保证、容易漏油等缺点,还能解决平面装载机只能实现平面内的轨迹输出,导致的动作不够灵活、工作空间有限、工作效率低等问题。
平面多连杆可控挖掘机构
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
本发明公开了一种平面多连杆可控挖掘机构 平面多连杆可控挖掘机构包括:机架;第一控制支链,其包括:一端铰接于机架上的第一主动杆,一端与第一主动杆的另一端铰接的第二连杆,一端与第二连杆的另一端铰接的第一动臂;第二控制支链,其包括,一端铰接于机架上的第二主动杆,一端与第二主动杆的另一端铰接的第三连杆,一端与第三连杆的另一端铰接的第二动臂;翻转支链,其包括:一端铰接于机架上的第三主动杆,一端与第三主动杆的另一端铰接的翻转杆,该翻转杆的中部与第二动臂的中部铰接,翻转杆的另一端铰接于第一动臂的中部;以及铲斗,其上部与第一动臂的另一端铰接,下部与第二动臂的另一端铰接。该平面多连杆可控挖掘机构较灵活,能够避免液压元件精度高、漏油等缺点。
一维转动动臂三维转动铲斗空间可控机构式装载机
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
本发明涉及一种一维转动动臂三维转动铲斗空间可控机构式装载机,包括车体、动臂、铲斗、四根主动杆、四根连杆和四台伺服电机,其动臂能实现独立的一维转动,铲斗能实现独立的三维转动,整个装载机能实现空间四活动度的运动输出。此种空间可控机构式装载机能有效克服液压装载机液压元件加工精度要求高、维修保养成本高、可靠度难保证、容易漏油等缺点,还能解决平面装载机只能实现平面内的轨迹输出,导致的动作不够灵活、工作空间有限、工作效率低等问题。
一种自调式可控机构式微型多自由度装载机构
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
一种自调式可控机构式微型多自由度装载机构,包括机架、动臂、铲斗翻转支链、动臂抬升支链、铲斗。动臂铰接在机架上,另一端铰接铲斗,铲斗翻转支链由伺服电机驱动,控制铲斗翻转,动臂抬升支链在伺服电机的驱动下控制动臂起降,配合铲斗翻转支链完成装载作业。由于该可控装载机构由安装在机架上的伺服电机驱动,工作装置易实现自动化、数控化控制,该机构结构更简单、造价低,承载能力高,更加适合制造小型微型装载机,而且避免了液压装载机液压元件制造成本高、维护保养复杂等缺点,同时与其它可控装载机构相比由于采用横梁设计,避免了两台伺服电机同时驱动动臂时由于不同步而产生的卡死以及刚性破坏。
一种3-3-1型七活动度空间液压挖掘机
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
一种3-3-1型五活动度空间液压挖掘机,包括三维转动臂机构、三维转动斗杆机构和一维转动铲斗机构。所述三维转动臂机构包括三维转动臂、第一液压缸、第二液压缸和第三液压缸,三维转动斗杆机构包括三维转动斗杆、第四液压缸、第五液压缸和第六液压缸,一维转动铲斗机构包括一维转动铲斗、第七液压缸、第一连杆和第二连杆。此种新型挖掘机的动臂和斗杆均能实现独立的空间三维转动,整个挖掘机能实现空间七活动度的运动,机构输出轨迹灵活、工作空间大、工作效率高,能在环境恶劣、空间狭小的施工工地以及需要快速挖掘、清障、平整的突发事故救援现场能发挥较好作用。
找到31项技术成果数据。
找技术 >四轴高速机器人
成熟度:正在研发
技术类型:-
应用行业:制造业
技术简介
p 成果与项目的背景及主要用途:随着与信息技术和网络技术的不断发展融合,工业机器人已由仅完成单项、 重复性操作任务的机械手逐步发展成为具有快速可重构、多功能、智能化等特征 的作业单元及大型自动化生产线,并随着技术的进步和市场的需求将在工业生产 中逐渐开始全面推广。技术原理与工艺流程简介:四轴高速机器人采用4-R(2-SS)型并联机构,其机械本体结构,包括固定平台、 私服驱动机构、支链和动平台四部分组成。1)主动膺2)球关节连接件3)从动皆连接销4)销端螺母5)从动膺技簧四条支链结构相同且轴对称均匀布置,其功能是用于传递驱动机构和动平台 间的运动。各零件的连接方式:主动臂1上端连接驱动机构的精密减速器输出法 兰轴,使主动臂的旋转角度与精密减速器输出法兰同步;另一端通过两个球关节6 分别连接两个相互平行的从动臂7,从动臂7两端带有球关节连接件2,与球关节 6之间通过从动臂连接销3和销端螺母4固定连接,相对应的销端螺母4上挂有从 动臂拉^ 5;所述支链主动臂采用工字型结构,以增强主动臂强度;所述支链从动 臂采用管型结构,材质为碳纤维高分子材料。四自由度高速并联机器人支链传递运动的实现:当精密减速器被伺服电机的 驱动旋转时,连接在精密减速器输出法兰上的主动臂1也被驱动进行同步旋转; 由从动臂7和球关节6组成的平行四边形机构将主动臂1末端的摆动传递给动平 台。性能参数如下:工作空间:C 1000mm*150mm, -180~180C700mm*100mm, -180~180加速度:100~200m/s2抓取频次:120-180picks/min定位精度:0.2mm/1重复精度:0.1mm/0.5应用领域:食品、医药、电子、新能源等行业中高速智能分选与包装合作方式及条件:具体面议 /p
一种二维转动动臂三维转动铲斗空间可控机构式装载机
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
本发明涉及一种二维转动动臂三维转动铲斗空间可控机构式装载机,包括车体、动臂、铲斗、五根主动杆、五根连杆和五台伺服电机,其动臂能实现独立的二维转动,铲斗能实现独立的三维转动,整个装载机能实现空间五活动度的运动输出。此种空间可控机构式装载机能有效克服液压装载机液压元件加工精度要求高、维修保养成本高、可靠度难保证、容易漏油等缺点,还能解决平面装载机只能实现平面内的轨迹输出,导致的动作不够灵活、工作空间有限、工作效率低等问题。
两活动度动臂一活动度斗杆两活动度铲斗空间挖掘机
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
两活动度动臂一活动度斗杆两活动度铲斗空间挖掘机,包括二维转动臂机构、一维转动斗杆机构和二维转动铲斗机构。所述二维转动臂机构包括二维转动臂、第一液压缸和第二液压缸,一维转动斗杆机构包括一维转动斗杆、第三液压缸,二维转动铲斗机构包括二维转动铲斗、第四液压缸和第五液压缸。此种新型挖掘机的动臂和铲斗均能实现独立的空间两维转动,整个挖掘机能实现空间五活动度的运动,机构输出轨迹灵活、工作空间大、工作效率高,能在环境恶劣、空间狭小的施工工地以及需要快速挖掘、清障、平整的突发事故救援现场能发挥较好作用。
一种液压挖掘机比例流量优先控制阀
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
一种液压挖掘机比例流量优先控制阀(专利号201310014338.8),包括阀体,柱塞,控制弹簧,顶杆,弹簧,阀芯。优先阀的A口接控制压力,阀芯上开有节流口。当回转与动臂提升复合动作时,系统根据回转的角度与动臂提升的高度来确定输入A口的压力,从而控制阀芯阀口的开度,使回转不同的角度,回转与动臂提升都能够协调。本装置由于能够比例的控制流入回转马达的流量,因此能够针对不同的回转角度与动臂提升高度的组合的复合动作,具有结构简单,性能稳定,使用寿命长等优点。
自装自卸散料汽车
成熟度:通过小试
技术类型:实用新型
应用行业:制造业
技术简介
实用新型专利技术转让项目:自装自卸散料汽车专利号:ZL201120035332.5技术领域:本实用新型属汽车技术领域,涉及一种散料汽车,特别是自卸散料汽车。背景技术:现有技术的散料汽车,一般都只能自卸,而不能自己装车。装车时,需采用人工或雇用装载机,如果采用人工装车,费时费力,效率很低。如果雇用装载机装车,不仅费用高,而且也不能保证及时。发明内容:本实用新型的目的是提供一种自装自卸散料汽车,用以有效的克服现有技术自卸散料汽车所存在的上述缺陷。本实用新型的目的是在现有技术自卸散料汽车的基础上改进实现的,它包括车箱、车架以及驱动桥钢性连接机构。其特征在于它的车箱两侧都设有加强筋,两侧加强筋交会处都铰接装配有可由司机通过操纵杆操作控制的油缸;它还有一动臂铲斗,该动臂铲斗的两动臂端分别铰接于上述所说车架的两侧,上述所说车箱两侧油缸的连杆分别铰接于动臂铲斗动臂的前端部;在它的驱动桥与车架的连接部位,还加装了驱动桥支承外板和内板。
一种二维转动动臂二维转动铲斗空间可控机构式装载机
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
本实用新型涉及一种二维转动动臂二维转动铲斗空间可控机构式装载机,包括车体、动臂、铲斗、四根主动杆、四根连杆和四台伺服电机,其动臂能实现独立的二维转动,铲斗能实现独立的二维转动,整个装载机能实现空间四活动度的运动输出。此种空间可控机构式装载机能有效克服液压装载机液压元件加工精度要求高、维修保养成本高、可靠度难保证、容易漏油等缺点,还能解决平面装载机只能实现平面内的轨迹输出,导致的动作不够灵活、工作空间有限、工作效率低等问题。
平面多连杆可控挖掘机构
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
本发明公开了一种平面多连杆可控挖掘机构 平面多连杆可控挖掘机构包括:机架;第一控制支链,其包括:一端铰接于机架上的第一主动杆,一端与第一主动杆的另一端铰接的第二连杆,一端与第二连杆的另一端铰接的第一动臂;第二控制支链,其包括,一端铰接于机架上的第二主动杆,一端与第二主动杆的另一端铰接的第三连杆,一端与第三连杆的另一端铰接的第二动臂;翻转支链,其包括:一端铰接于机架上的第三主动杆,一端与第三主动杆的另一端铰接的翻转杆,该翻转杆的中部与第二动臂的中部铰接,翻转杆的另一端铰接于第一动臂的中部;以及铲斗,其上部与第一动臂的另一端铰接,下部与第二动臂的另一端铰接。该平面多连杆可控挖掘机构较灵活,能够避免液压元件精度高、漏油等缺点。
一维转动动臂三维转动铲斗空间可控机构式装载机
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
本发明涉及一种一维转动动臂三维转动铲斗空间可控机构式装载机,包括车体、动臂、铲斗、四根主动杆、四根连杆和四台伺服电机,其动臂能实现独立的一维转动,铲斗能实现独立的三维转动,整个装载机能实现空间四活动度的运动输出。此种空间可控机构式装载机能有效克服液压装载机液压元件加工精度要求高、维修保养成本高、可靠度难保证、容易漏油等缺点,还能解决平面装载机只能实现平面内的轨迹输出,导致的动作不够灵活、工作空间有限、工作效率低等问题。
一种自调式可控机构式微型多自由度装载机构
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
一种自调式可控机构式微型多自由度装载机构,包括机架、动臂、铲斗翻转支链、动臂抬升支链、铲斗。动臂铰接在机架上,另一端铰接铲斗,铲斗翻转支链由伺服电机驱动,控制铲斗翻转,动臂抬升支链在伺服电机的驱动下控制动臂起降,配合铲斗翻转支链完成装载作业。由于该可控装载机构由安装在机架上的伺服电机驱动,工作装置易实现自动化、数控化控制,该机构结构更简单、造价低,承载能力高,更加适合制造小型微型装载机,而且避免了液压装载机液压元件制造成本高、维护保养复杂等缺点,同时与其它可控装载机构相比由于采用横梁设计,避免了两台伺服电机同时驱动动臂时由于不同步而产生的卡死以及刚性破坏。
一种3-3-1型七活动度空间液压挖掘机
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
一种3-3-1型五活动度空间液压挖掘机,包括三维转动臂机构、三维转动斗杆机构和一维转动铲斗机构。所述三维转动臂机构包括三维转动臂、第一液压缸、第二液压缸和第三液压缸,三维转动斗杆机构包括三维转动斗杆、第四液压缸、第五液压缸和第六液压缸,一维转动铲斗机构包括一维转动铲斗、第七液压缸、第一连杆和第二连杆。此种新型挖掘机的动臂和斗杆均能实现独立的空间三维转动,整个挖掘机能实现空间七活动度的运动,机构输出轨迹灵活、工作空间大、工作效率高,能在环境恶劣、空间狭小的施工工地以及需要快速挖掘、清障、平整的突发事故救援现场能发挥较好作用。
找到31项技术成果数据。
找技术 >四轴高速机器人
成熟度:正在研发
技术类型:-
应用行业:制造业
技术简介
p 成果与项目的背景及主要用途:随着与信息技术和网络技术的不断发展融合,工业机器人已由仅完成单项、 重复性操作任务的机械手逐步发展成为具有快速可重构、多功能、智能化等特征 的作业单元及大型自动化生产线,并随着技术的进步和市场的需求将在工业生产 中逐渐开始全面推广。技术原理与工艺流程简介:四轴高速机器人采用4-R(2-SS)型并联机构,其机械本体结构,包括固定平台、 私服驱动机构、支链和动平台四部分组成。1)主动膺2)球关节连接件3)从动皆连接销4)销端螺母5)从动膺技簧四条支链结构相同且轴对称均匀布置,其功能是用于传递驱动机构和动平台 间的运动。各零件的连接方式:主动臂1上端连接驱动机构的精密减速器输出法 兰轴,使主动臂的旋转角度与精密减速器输出法兰同步;另一端通过两个球关节6 分别连接两个相互平行的从动臂7,从动臂7两端带有球关节连接件2,与球关节 6之间通过从动臂连接销3和销端螺母4固定连接,相对应的销端螺母4上挂有从 动臂拉^ 5;所述支链主动臂采用工字型结构,以增强主动臂强度;所述支链从动 臂采用管型结构,材质为碳纤维高分子材料。四自由度高速并联机器人支链传递运动的实现:当精密减速器被伺服电机的 驱动旋转时,连接在精密减速器输出法兰上的主动臂1也被驱动进行同步旋转; 由从动臂7和球关节6组成的平行四边形机构将主动臂1末端的摆动传递给动平 台。性能参数如下:工作空间:C 1000mm*150mm, -180~180C700mm*100mm, -180~180加速度:100~200m/s2抓取频次:120-180picks/min定位精度:0.2mm/1重复精度:0.1mm/0.5应用领域:食品、医药、电子、新能源等行业中高速智能分选与包装合作方式及条件:具体面议 /p
一种二维转动动臂三维转动铲斗空间可控机构式装载机
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
本发明涉及一种二维转动动臂三维转动铲斗空间可控机构式装载机,包括车体、动臂、铲斗、五根主动杆、五根连杆和五台伺服电机,其动臂能实现独立的二维转动,铲斗能实现独立的三维转动,整个装载机能实现空间五活动度的运动输出。此种空间可控机构式装载机能有效克服液压装载机液压元件加工精度要求高、维修保养成本高、可靠度难保证、容易漏油等缺点,还能解决平面装载机只能实现平面内的轨迹输出,导致的动作不够灵活、工作空间有限、工作效率低等问题。
两活动度动臂一活动度斗杆两活动度铲斗空间挖掘机
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
两活动度动臂一活动度斗杆两活动度铲斗空间挖掘机,包括二维转动臂机构、一维转动斗杆机构和二维转动铲斗机构。所述二维转动臂机构包括二维转动臂、第一液压缸和第二液压缸,一维转动斗杆机构包括一维转动斗杆、第三液压缸,二维转动铲斗机构包括二维转动铲斗、第四液压缸和第五液压缸。此种新型挖掘机的动臂和铲斗均能实现独立的空间两维转动,整个挖掘机能实现空间五活动度的运动,机构输出轨迹灵活、工作空间大、工作效率高,能在环境恶劣、空间狭小的施工工地以及需要快速挖掘、清障、平整的突发事故救援现场能发挥较好作用。
一种液压挖掘机比例流量优先控制阀
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
一种液压挖掘机比例流量优先控制阀(专利号201310014338.8),包括阀体,柱塞,控制弹簧,顶杆,弹簧,阀芯。优先阀的A口接控制压力,阀芯上开有节流口。当回转与动臂提升复合动作时,系统根据回转的角度与动臂提升的高度来确定输入A口的压力,从而控制阀芯阀口的开度,使回转不同的角度,回转与动臂提升都能够协调。本装置由于能够比例的控制流入回转马达的流量,因此能够针对不同的回转角度与动臂提升高度的组合的复合动作,具有结构简单,性能稳定,使用寿命长等优点。
自装自卸散料汽车
成熟度:通过小试
技术类型:实用新型
应用行业:制造业
技术简介
实用新型专利技术转让项目:自装自卸散料汽车专利号:ZL201120035332.5技术领域:本实用新型属汽车技术领域,涉及一种散料汽车,特别是自卸散料汽车。背景技术:现有技术的散料汽车,一般都只能自卸,而不能自己装车。装车时,需采用人工或雇用装载机,如果采用人工装车,费时费力,效率很低。如果雇用装载机装车,不仅费用高,而且也不能保证及时。发明内容:本实用新型的目的是提供一种自装自卸散料汽车,用以有效的克服现有技术自卸散料汽车所存在的上述缺陷。本实用新型的目的是在现有技术自卸散料汽车的基础上改进实现的,它包括车箱、车架以及驱动桥钢性连接机构。其特征在于它的车箱两侧都设有加强筋,两侧加强筋交会处都铰接装配有可由司机通过操纵杆操作控制的油缸;它还有一动臂铲斗,该动臂铲斗的两动臂端分别铰接于上述所说车架的两侧,上述所说车箱两侧油缸的连杆分别铰接于动臂铲斗动臂的前端部;在它的驱动桥与车架的连接部位,还加装了驱动桥支承外板和内板。
一种二维转动动臂二维转动铲斗空间可控机构式装载机
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
本实用新型涉及一种二维转动动臂二维转动铲斗空间可控机构式装载机,包括车体、动臂、铲斗、四根主动杆、四根连杆和四台伺服电机,其动臂能实现独立的二维转动,铲斗能实现独立的二维转动,整个装载机能实现空间四活动度的运动输出。此种空间可控机构式装载机能有效克服液压装载机液压元件加工精度要求高、维修保养成本高、可靠度难保证、容易漏油等缺点,还能解决平面装载机只能实现平面内的轨迹输出,导致的动作不够灵活、工作空间有限、工作效率低等问题。
平面多连杆可控挖掘机构
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
本发明公开了一种平面多连杆可控挖掘机构 平面多连杆可控挖掘机构包括:机架;第一控制支链,其包括:一端铰接于机架上的第一主动杆,一端与第一主动杆的另一端铰接的第二连杆,一端与第二连杆的另一端铰接的第一动臂;第二控制支链,其包括,一端铰接于机架上的第二主动杆,一端与第二主动杆的另一端铰接的第三连杆,一端与第三连杆的另一端铰接的第二动臂;翻转支链,其包括:一端铰接于机架上的第三主动杆,一端与第三主动杆的另一端铰接的翻转杆,该翻转杆的中部与第二动臂的中部铰接,翻转杆的另一端铰接于第一动臂的中部;以及铲斗,其上部与第一动臂的另一端铰接,下部与第二动臂的另一端铰接。该平面多连杆可控挖掘机构较灵活,能够避免液压元件精度高、漏油等缺点。
一维转动动臂三维转动铲斗空间可控机构式装载机
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
本发明涉及一种一维转动动臂三维转动铲斗空间可控机构式装载机,包括车体、动臂、铲斗、四根主动杆、四根连杆和四台伺服电机,其动臂能实现独立的一维转动,铲斗能实现独立的三维转动,整个装载机能实现空间四活动度的运动输出。此种空间可控机构式装载机能有效克服液压装载机液压元件加工精度要求高、维修保养成本高、可靠度难保证、容易漏油等缺点,还能解决平面装载机只能实现平面内的轨迹输出,导致的动作不够灵活、工作空间有限、工作效率低等问题。
一种自调式可控机构式微型多自由度装载机构
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
一种自调式可控机构式微型多自由度装载机构,包括机架、动臂、铲斗翻转支链、动臂抬升支链、铲斗。动臂铰接在机架上,另一端铰接铲斗,铲斗翻转支链由伺服电机驱动,控制铲斗翻转,动臂抬升支链在伺服电机的驱动下控制动臂起降,配合铲斗翻转支链完成装载作业。由于该可控装载机构由安装在机架上的伺服电机驱动,工作装置易实现自动化、数控化控制,该机构结构更简单、造价低,承载能力高,更加适合制造小型微型装载机,而且避免了液压装载机液压元件制造成本高、维护保养复杂等缺点,同时与其它可控装载机构相比由于采用横梁设计,避免了两台伺服电机同时驱动动臂时由于不同步而产生的卡死以及刚性破坏。
一种3-3-1型七活动度空间液压挖掘机
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
一种3-3-1型五活动度空间液压挖掘机,包括三维转动臂机构、三维转动斗杆机构和一维转动铲斗机构。所述三维转动臂机构包括三维转动臂、第一液压缸、第二液压缸和第三液压缸,三维转动斗杆机构包括三维转动斗杆、第四液压缸、第五液压缸和第六液压缸,一维转动铲斗机构包括一维转动铲斗、第七液压缸、第一连杆和第二连杆。此种新型挖掘机的动臂和斗杆均能实现独立的空间三维转动,整个挖掘机能实现空间七活动度的运动,机构输出轨迹灵活、工作空间大、工作效率高,能在环境恶劣、空间狭小的施工工地以及需要快速挖掘、清障、平整的突发事故救援现场能发挥较好作用。
找到31项技术成果数据。
找技术 >四轴高速机器人
成熟度:正在研发
技术类型:-
应用行业:制造业
技术简介
p 成果与项目的背景及主要用途:随着与信息技术和网络技术的不断发展融合,工业机器人已由仅完成单项、 重复性操作任务的机械手逐步发展成为具有快速可重构、多功能、智能化等特征 的作业单元及大型自动化生产线,并随着技术的进步和市场的需求将在工业生产 中逐渐开始全面推广。技术原理与工艺流程简介:四轴高速机器人采用4-R(2-SS)型并联机构,其机械本体结构,包括固定平台、 私服驱动机构、支链和动平台四部分组成。1)主动膺2)球关节连接件3)从动皆连接销4)销端螺母5)从动膺技簧四条支链结构相同且轴对称均匀布置,其功能是用于传递驱动机构和动平台 间的运动。各零件的连接方式:主动臂1上端连接驱动机构的精密减速器输出法 兰轴,使主动臂的旋转角度与精密减速器输出法兰同步;另一端通过两个球关节6 分别连接两个相互平行的从动臂7,从动臂7两端带有球关节连接件2,与球关节 6之间通过从动臂连接销3和销端螺母4固定连接,相对应的销端螺母4上挂有从 动臂拉^ 5;所述支链主动臂采用工字型结构,以增强主动臂强度;所述支链从动 臂采用管型结构,材质为碳纤维高分子材料。四自由度高速并联机器人支链传递运动的实现:当精密减速器被伺服电机的 驱动旋转时,连接在精密减速器输出法兰上的主动臂1也被驱动进行同步旋转; 由从动臂7和球关节6组成的平行四边形机构将主动臂1末端的摆动传递给动平 台。性能参数如下:工作空间:C 1000mm*150mm, -180~180C700mm*100mm, -180~180加速度:100~200m/s2抓取频次:120-180picks/min定位精度:0.2mm/1重复精度:0.1mm/0.5应用领域:食品、医药、电子、新能源等行业中高速智能分选与包装合作方式及条件:具体面议 /p
一种二维转动动臂三维转动铲斗空间可控机构式装载机
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
本发明涉及一种二维转动动臂三维转动铲斗空间可控机构式装载机,包括车体、动臂、铲斗、五根主动杆、五根连杆和五台伺服电机,其动臂能实现独立的二维转动,铲斗能实现独立的三维转动,整个装载机能实现空间五活动度的运动输出。此种空间可控机构式装载机能有效克服液压装载机液压元件加工精度要求高、维修保养成本高、可靠度难保证、容易漏油等缺点,还能解决平面装载机只能实现平面内的轨迹输出,导致的动作不够灵活、工作空间有限、工作效率低等问题。
两活动度动臂一活动度斗杆两活动度铲斗空间挖掘机
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
两活动度动臂一活动度斗杆两活动度铲斗空间挖掘机,包括二维转动臂机构、一维转动斗杆机构和二维转动铲斗机构。所述二维转动臂机构包括二维转动臂、第一液压缸和第二液压缸,一维转动斗杆机构包括一维转动斗杆、第三液压缸,二维转动铲斗机构包括二维转动铲斗、第四液压缸和第五液压缸。此种新型挖掘机的动臂和铲斗均能实现独立的空间两维转动,整个挖掘机能实现空间五活动度的运动,机构输出轨迹灵活、工作空间大、工作效率高,能在环境恶劣、空间狭小的施工工地以及需要快速挖掘、清障、平整的突发事故救援现场能发挥较好作用。
一种液压挖掘机比例流量优先控制阀
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
一种液压挖掘机比例流量优先控制阀(专利号201310014338.8),包括阀体,柱塞,控制弹簧,顶杆,弹簧,阀芯。优先阀的A口接控制压力,阀芯上开有节流口。当回转与动臂提升复合动作时,系统根据回转的角度与动臂提升的高度来确定输入A口的压力,从而控制阀芯阀口的开度,使回转不同的角度,回转与动臂提升都能够协调。本装置由于能够比例的控制流入回转马达的流量,因此能够针对不同的回转角度与动臂提升高度的组合的复合动作,具有结构简单,性能稳定,使用寿命长等优点。
自装自卸散料汽车
成熟度:通过小试
技术类型:实用新型
应用行业:制造业
技术简介
实用新型专利技术转让项目:自装自卸散料汽车专利号:ZL201120035332.5技术领域:本实用新型属汽车技术领域,涉及一种散料汽车,特别是自卸散料汽车。背景技术:现有技术的散料汽车,一般都只能自卸,而不能自己装车。装车时,需采用人工或雇用装载机,如果采用人工装车,费时费力,效率很低。如果雇用装载机装车,不仅费用高,而且也不能保证及时。发明内容:本实用新型的目的是提供一种自装自卸散料汽车,用以有效的克服现有技术自卸散料汽车所存在的上述缺陷。本实用新型的目的是在现有技术自卸散料汽车的基础上改进实现的,它包括车箱、车架以及驱动桥钢性连接机构。其特征在于它的车箱两侧都设有加强筋,两侧加强筋交会处都铰接装配有可由司机通过操纵杆操作控制的油缸;它还有一动臂铲斗,该动臂铲斗的两动臂端分别铰接于上述所说车架的两侧,上述所说车箱两侧油缸的连杆分别铰接于动臂铲斗动臂的前端部;在它的驱动桥与车架的连接部位,还加装了驱动桥支承外板和内板。
一种二维转动动臂二维转动铲斗空间可控机构式装载机
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
本实用新型涉及一种二维转动动臂二维转动铲斗空间可控机构式装载机,包括车体、动臂、铲斗、四根主动杆、四根连杆和四台伺服电机,其动臂能实现独立的二维转动,铲斗能实现独立的二维转动,整个装载机能实现空间四活动度的运动输出。此种空间可控机构式装载机能有效克服液压装载机液压元件加工精度要求高、维修保养成本高、可靠度难保证、容易漏油等缺点,还能解决平面装载机只能实现平面内的轨迹输出,导致的动作不够灵活、工作空间有限、工作效率低等问题。
平面多连杆可控挖掘机构
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
本发明公开了一种平面多连杆可控挖掘机构 平面多连杆可控挖掘机构包括:机架;第一控制支链,其包括:一端铰接于机架上的第一主动杆,一端与第一主动杆的另一端铰接的第二连杆,一端与第二连杆的另一端铰接的第一动臂;第二控制支链,其包括,一端铰接于机架上的第二主动杆,一端与第二主动杆的另一端铰接的第三连杆,一端与第三连杆的另一端铰接的第二动臂;翻转支链,其包括:一端铰接于机架上的第三主动杆,一端与第三主动杆的另一端铰接的翻转杆,该翻转杆的中部与第二动臂的中部铰接,翻转杆的另一端铰接于第一动臂的中部;以及铲斗,其上部与第一动臂的另一端铰接,下部与第二动臂的另一端铰接。该平面多连杆可控挖掘机构较灵活,能够避免液压元件精度高、漏油等缺点。
一维转动动臂三维转动铲斗空间可控机构式装载机
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
本发明涉及一种一维转动动臂三维转动铲斗空间可控机构式装载机,包括车体、动臂、铲斗、四根主动杆、四根连杆和四台伺服电机,其动臂能实现独立的一维转动,铲斗能实现独立的三维转动,整个装载机能实现空间四活动度的运动输出。此种空间可控机构式装载机能有效克服液压装载机液压元件加工精度要求高、维修保养成本高、可靠度难保证、容易漏油等缺点,还能解决平面装载机只能实现平面内的轨迹输出,导致的动作不够灵活、工作空间有限、工作效率低等问题。
一种自调式可控机构式微型多自由度装载机构
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
一种自调式可控机构式微型多自由度装载机构,包括机架、动臂、铲斗翻转支链、动臂抬升支链、铲斗。动臂铰接在机架上,另一端铰接铲斗,铲斗翻转支链由伺服电机驱动,控制铲斗翻转,动臂抬升支链在伺服电机的驱动下控制动臂起降,配合铲斗翻转支链完成装载作业。由于该可控装载机构由安装在机架上的伺服电机驱动,工作装置易实现自动化、数控化控制,该机构结构更简单、造价低,承载能力高,更加适合制造小型微型装载机,而且避免了液压装载机液压元件制造成本高、维护保养复杂等缺点,同时与其它可控装载机构相比由于采用横梁设计,避免了两台伺服电机同时驱动动臂时由于不同步而产生的卡死以及刚性破坏。
一种3-3-1型七活动度空间液压挖掘机
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
一种3-3-1型五活动度空间液压挖掘机,包括三维转动臂机构、三维转动斗杆机构和一维转动铲斗机构。所述三维转动臂机构包括三维转动臂、第一液压缸、第二液压缸和第三液压缸,三维转动斗杆机构包括三维转动斗杆、第四液压缸、第五液压缸和第六液压缸,一维转动铲斗机构包括一维转动铲斗、第七液压缸、第一连杆和第二连杆。此种新型挖掘机的动臂和斗杆均能实现独立的空间三维转动,整个挖掘机能实现空间七活动度的运动,机构输出轨迹灵活、工作空间大、工作效率高,能在环境恶劣、空间狭小的施工工地以及需要快速挖掘、清障、平整的突发事故救援现场能发挥较好作用。
找到31项技术成果数据。
找技术 >四轴高速机器人
成熟度:正在研发
技术类型:-
应用行业:制造业
技术简介
p 成果与项目的背景及主要用途:随着与信息技术和网络技术的不断发展融合,工业机器人已由仅完成单项、 重复性操作任务的机械手逐步发展成为具有快速可重构、多功能、智能化等特征 的作业单元及大型自动化生产线,并随着技术的进步和市场的需求将在工业生产 中逐渐开始全面推广。技术原理与工艺流程简介:四轴高速机器人采用4-R(2-SS)型并联机构,其机械本体结构,包括固定平台、 私服驱动机构、支链和动平台四部分组成。1)主动膺2)球关节连接件3)从动皆连接销4)销端螺母5)从动膺技簧四条支链结构相同且轴对称均匀布置,其功能是用于传递驱动机构和动平台 间的运动。各零件的连接方式:主动臂1上端连接驱动机构的精密减速器输出法 兰轴,使主动臂的旋转角度与精密减速器输出法兰同步;另一端通过两个球关节6 分别连接两个相互平行的从动臂7,从动臂7两端带有球关节连接件2,与球关节 6之间通过从动臂连接销3和销端螺母4固定连接,相对应的销端螺母4上挂有从 动臂拉^ 5;所述支链主动臂采用工字型结构,以增强主动臂强度;所述支链从动 臂采用管型结构,材质为碳纤维高分子材料。四自由度高速并联机器人支链传递运动的实现:当精密减速器被伺服电机的 驱动旋转时,连接在精密减速器输出法兰上的主动臂1也被驱动进行同步旋转; 由从动臂7和球关节6组成的平行四边形机构将主动臂1末端的摆动传递给动平 台。性能参数如下:工作空间:C 1000mm*150mm, -180~180C700mm*100mm, -180~180加速度:100~200m/s2抓取频次:120-180picks/min定位精度:0.2mm/1重复精度:0.1mm/0.5应用领域:食品、医药、电子、新能源等行业中高速智能分选与包装合作方式及条件:具体面议 /p
一种二维转动动臂三维转动铲斗空间可控机构式装载机
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
本发明涉及一种二维转动动臂三维转动铲斗空间可控机构式装载机,包括车体、动臂、铲斗、五根主动杆、五根连杆和五台伺服电机,其动臂能实现独立的二维转动,铲斗能实现独立的三维转动,整个装载机能实现空间五活动度的运动输出。此种空间可控机构式装载机能有效克服液压装载机液压元件加工精度要求高、维修保养成本高、可靠度难保证、容易漏油等缺点,还能解决平面装载机只能实现平面内的轨迹输出,导致的动作不够灵活、工作空间有限、工作效率低等问题。
两活动度动臂一活动度斗杆两活动度铲斗空间挖掘机
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
两活动度动臂一活动度斗杆两活动度铲斗空间挖掘机,包括二维转动臂机构、一维转动斗杆机构和二维转动铲斗机构。所述二维转动臂机构包括二维转动臂、第一液压缸和第二液压缸,一维转动斗杆机构包括一维转动斗杆、第三液压缸,二维转动铲斗机构包括二维转动铲斗、第四液压缸和第五液压缸。此种新型挖掘机的动臂和铲斗均能实现独立的空间两维转动,整个挖掘机能实现空间五活动度的运动,机构输出轨迹灵活、工作空间大、工作效率高,能在环境恶劣、空间狭小的施工工地以及需要快速挖掘、清障、平整的突发事故救援现场能发挥较好作用。
一种液压挖掘机比例流量优先控制阀
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
一种液压挖掘机比例流量优先控制阀(专利号201310014338.8),包括阀体,柱塞,控制弹簧,顶杆,弹簧,阀芯。优先阀的A口接控制压力,阀芯上开有节流口。当回转与动臂提升复合动作时,系统根据回转的角度与动臂提升的高度来确定输入A口的压力,从而控制阀芯阀口的开度,使回转不同的角度,回转与动臂提升都能够协调。本装置由于能够比例的控制流入回转马达的流量,因此能够针对不同的回转角度与动臂提升高度的组合的复合动作,具有结构简单,性能稳定,使用寿命长等优点。
自装自卸散料汽车
成熟度:通过小试
技术类型:实用新型
应用行业:制造业
技术简介
实用新型专利技术转让项目:自装自卸散料汽车专利号:ZL201120035332.5技术领域:本实用新型属汽车技术领域,涉及一种散料汽车,特别是自卸散料汽车。背景技术:现有技术的散料汽车,一般都只能自卸,而不能自己装车。装车时,需采用人工或雇用装载机,如果采用人工装车,费时费力,效率很低。如果雇用装载机装车,不仅费用高,而且也不能保证及时。发明内容:本实用新型的目的是提供一种自装自卸散料汽车,用以有效的克服现有技术自卸散料汽车所存在的上述缺陷。本实用新型的目的是在现有技术自卸散料汽车的基础上改进实现的,它包括车箱、车架以及驱动桥钢性连接机构。其特征在于它的车箱两侧都设有加强筋,两侧加强筋交会处都铰接装配有可由司机通过操纵杆操作控制的油缸;它还有一动臂铲斗,该动臂铲斗的两动臂端分别铰接于上述所说车架的两侧,上述所说车箱两侧油缸的连杆分别铰接于动臂铲斗动臂的前端部;在它的驱动桥与车架的连接部位,还加装了驱动桥支承外板和内板。
一种二维转动动臂二维转动铲斗空间可控机构式装载机
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
本实用新型涉及一种二维转动动臂二维转动铲斗空间可控机构式装载机,包括车体、动臂、铲斗、四根主动杆、四根连杆和四台伺服电机,其动臂能实现独立的二维转动,铲斗能实现独立的二维转动,整个装载机能实现空间四活动度的运动输出。此种空间可控机构式装载机能有效克服液压装载机液压元件加工精度要求高、维修保养成本高、可靠度难保证、容易漏油等缺点,还能解决平面装载机只能实现平面内的轨迹输出,导致的动作不够灵活、工作空间有限、工作效率低等问题。
平面多连杆可控挖掘机构
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
本发明公开了一种平面多连杆可控挖掘机构 平面多连杆可控挖掘机构包括:机架;第一控制支链,其包括:一端铰接于机架上的第一主动杆,一端与第一主动杆的另一端铰接的第二连杆,一端与第二连杆的另一端铰接的第一动臂;第二控制支链,其包括,一端铰接于机架上的第二主动杆,一端与第二主动杆的另一端铰接的第三连杆,一端与第三连杆的另一端铰接的第二动臂;翻转支链,其包括:一端铰接于机架上的第三主动杆,一端与第三主动杆的另一端铰接的翻转杆,该翻转杆的中部与第二动臂的中部铰接,翻转杆的另一端铰接于第一动臂的中部;以及铲斗,其上部与第一动臂的另一端铰接,下部与第二动臂的另一端铰接。该平面多连杆可控挖掘机构较灵活,能够避免液压元件精度高、漏油等缺点。
一维转动动臂三维转动铲斗空间可控机构式装载机
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
本发明涉及一种一维转动动臂三维转动铲斗空间可控机构式装载机,包括车体、动臂、铲斗、四根主动杆、四根连杆和四台伺服电机,其动臂能实现独立的一维转动,铲斗能实现独立的三维转动,整个装载机能实现空间四活动度的运动输出。此种空间可控机构式装载机能有效克服液压装载机液压元件加工精度要求高、维修保养成本高、可靠度难保证、容易漏油等缺点,还能解决平面装载机只能实现平面内的轨迹输出,导致的动作不够灵活、工作空间有限、工作效率低等问题。
一种自调式可控机构式微型多自由度装载机构
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
一种自调式可控机构式微型多自由度装载机构,包括机架、动臂、铲斗翻转支链、动臂抬升支链、铲斗。动臂铰接在机架上,另一端铰接铲斗,铲斗翻转支链由伺服电机驱动,控制铲斗翻转,动臂抬升支链在伺服电机的驱动下控制动臂起降,配合铲斗翻转支链完成装载作业。由于该可控装载机构由安装在机架上的伺服电机驱动,工作装置易实现自动化、数控化控制,该机构结构更简单、造价低,承载能力高,更加适合制造小型微型装载机,而且避免了液压装载机液压元件制造成本高、维护保养复杂等缺点,同时与其它可控装载机构相比由于采用横梁设计,避免了两台伺服电机同时驱动动臂时由于不同步而产生的卡死以及刚性破坏。
一种3-3-1型七活动度空间液压挖掘机
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
一种3-3-1型五活动度空间液压挖掘机,包括三维转动臂机构、三维转动斗杆机构和一维转动铲斗机构。所述三维转动臂机构包括三维转动臂、第一液压缸、第二液压缸和第三液压缸,三维转动斗杆机构包括三维转动斗杆、第四液压缸、第五液压缸和第六液压缸,一维转动铲斗机构包括一维转动铲斗、第七液压缸、第一连杆和第二连杆。此种新型挖掘机的动臂和斗杆均能实现独立的空间三维转动,整个挖掘机能实现空间七活动度的运动,机构输出轨迹灵活、工作空间大、工作效率高,能在环境恶劣、空间狭小的施工工地以及需要快速挖掘、清障、平整的突发事故救援现场能发挥较好作用。
找到31项技术成果数据。
找技术 >四轴高速机器人
成熟度:正在研发
技术类型:-
应用行业:制造业
技术简介
p 成果与项目的背景及主要用途:随着与信息技术和网络技术的不断发展融合,工业机器人已由仅完成单项、 重复性操作任务的机械手逐步发展成为具有快速可重构、多功能、智能化等特征 的作业单元及大型自动化生产线,并随着技术的进步和市场的需求将在工业生产 中逐渐开始全面推广。技术原理与工艺流程简介:四轴高速机器人采用4-R(2-SS)型并联机构,其机械本体结构,包括固定平台、 私服驱动机构、支链和动平台四部分组成。1)主动膺2)球关节连接件3)从动皆连接销4)销端螺母5)从动膺技簧四条支链结构相同且轴对称均匀布置,其功能是用于传递驱动机构和动平台 间的运动。各零件的连接方式:主动臂1上端连接驱动机构的精密减速器输出法 兰轴,使主动臂的旋转角度与精密减速器输出法兰同步;另一端通过两个球关节6 分别连接两个相互平行的从动臂7,从动臂7两端带有球关节连接件2,与球关节 6之间通过从动臂连接销3和销端螺母4固定连接,相对应的销端螺母4上挂有从 动臂拉^ 5;所述支链主动臂采用工字型结构,以增强主动臂强度;所述支链从动 臂采用管型结构,材质为碳纤维高分子材料。四自由度高速并联机器人支链传递运动的实现:当精密减速器被伺服电机的 驱动旋转时,连接在精密减速器输出法兰上的主动臂1也被驱动进行同步旋转; 由从动臂7和球关节6组成的平行四边形机构将主动臂1末端的摆动传递给动平 台。性能参数如下:工作空间:C 1000mm*150mm, -180~180C700mm*100mm, -180~180加速度:100~200m/s2抓取频次:120-180picks/min定位精度:0.2mm/1重复精度:0.1mm/0.5应用领域:食品、医药、电子、新能源等行业中高速智能分选与包装合作方式及条件:具体面议 /p
一种二维转动动臂三维转动铲斗空间可控机构式装载机
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
本发明涉及一种二维转动动臂三维转动铲斗空间可控机构式装载机,包括车体、动臂、铲斗、五根主动杆、五根连杆和五台伺服电机,其动臂能实现独立的二维转动,铲斗能实现独立的三维转动,整个装载机能实现空间五活动度的运动输出。此种空间可控机构式装载机能有效克服液压装载机液压元件加工精度要求高、维修保养成本高、可靠度难保证、容易漏油等缺点,还能解决平面装载机只能实现平面内的轨迹输出,导致的动作不够灵活、工作空间有限、工作效率低等问题。
两活动度动臂一活动度斗杆两活动度铲斗空间挖掘机
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
两活动度动臂一活动度斗杆两活动度铲斗空间挖掘机,包括二维转动臂机构、一维转动斗杆机构和二维转动铲斗机构。所述二维转动臂机构包括二维转动臂、第一液压缸和第二液压缸,一维转动斗杆机构包括一维转动斗杆、第三液压缸,二维转动铲斗机构包括二维转动铲斗、第四液压缸和第五液压缸。此种新型挖掘机的动臂和铲斗均能实现独立的空间两维转动,整个挖掘机能实现空间五活动度的运动,机构输出轨迹灵活、工作空间大、工作效率高,能在环境恶劣、空间狭小的施工工地以及需要快速挖掘、清障、平整的突发事故救援现场能发挥较好作用。
一种液压挖掘机比例流量优先控制阀
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
一种液压挖掘机比例流量优先控制阀(专利号201310014338.8),包括阀体,柱塞,控制弹簧,顶杆,弹簧,阀芯。优先阀的A口接控制压力,阀芯上开有节流口。当回转与动臂提升复合动作时,系统根据回转的角度与动臂提升的高度来确定输入A口的压力,从而控制阀芯阀口的开度,使回转不同的角度,回转与动臂提升都能够协调。本装置由于能够比例的控制流入回转马达的流量,因此能够针对不同的回转角度与动臂提升高度的组合的复合动作,具有结构简单,性能稳定,使用寿命长等优点。
自装自卸散料汽车
成熟度:通过小试
技术类型:实用新型
应用行业:制造业
技术简介
实用新型专利技术转让项目:自装自卸散料汽车专利号:ZL201120035332.5技术领域:本实用新型属汽车技术领域,涉及一种散料汽车,特别是自卸散料汽车。背景技术:现有技术的散料汽车,一般都只能自卸,而不能自己装车。装车时,需采用人工或雇用装载机,如果采用人工装车,费时费力,效率很低。如果雇用装载机装车,不仅费用高,而且也不能保证及时。发明内容:本实用新型的目的是提供一种自装自卸散料汽车,用以有效的克服现有技术自卸散料汽车所存在的上述缺陷。本实用新型的目的是在现有技术自卸散料汽车的基础上改进实现的,它包括车箱、车架以及驱动桥钢性连接机构。其特征在于它的车箱两侧都设有加强筋,两侧加强筋交会处都铰接装配有可由司机通过操纵杆操作控制的油缸;它还有一动臂铲斗,该动臂铲斗的两动臂端分别铰接于上述所说车架的两侧,上述所说车箱两侧油缸的连杆分别铰接于动臂铲斗动臂的前端部;在它的驱动桥与车架的连接部位,还加装了驱动桥支承外板和内板。
一种二维转动动臂二维转动铲斗空间可控机构式装载机
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
本实用新型涉及一种二维转动动臂二维转动铲斗空间可控机构式装载机,包括车体、动臂、铲斗、四根主动杆、四根连杆和四台伺服电机,其动臂能实现独立的二维转动,铲斗能实现独立的二维转动,整个装载机能实现空间四活动度的运动输出。此种空间可控机构式装载机能有效克服液压装载机液压元件加工精度要求高、维修保养成本高、可靠度难保证、容易漏油等缺点,还能解决平面装载机只能实现平面内的轨迹输出,导致的动作不够灵活、工作空间有限、工作效率低等问题。
平面多连杆可控挖掘机构
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
本发明公开了一种平面多连杆可控挖掘机构 平面多连杆可控挖掘机构包括:机架;第一控制支链,其包括:一端铰接于机架上的第一主动杆,一端与第一主动杆的另一端铰接的第二连杆,一端与第二连杆的另一端铰接的第一动臂;第二控制支链,其包括,一端铰接于机架上的第二主动杆,一端与第二主动杆的另一端铰接的第三连杆,一端与第三连杆的另一端铰接的第二动臂;翻转支链,其包括:一端铰接于机架上的第三主动杆,一端与第三主动杆的另一端铰接的翻转杆,该翻转杆的中部与第二动臂的中部铰接,翻转杆的另一端铰接于第一动臂的中部;以及铲斗,其上部与第一动臂的另一端铰接,下部与第二动臂的另一端铰接。该平面多连杆可控挖掘机构较灵活,能够避免液压元件精度高、漏油等缺点。
一维转动动臂三维转动铲斗空间可控机构式装载机
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
本发明涉及一种一维转动动臂三维转动铲斗空间可控机构式装载机,包括车体、动臂、铲斗、四根主动杆、四根连杆和四台伺服电机,其动臂能实现独立的一维转动,铲斗能实现独立的三维转动,整个装载机能实现空间四活动度的运动输出。此种空间可控机构式装载机能有效克服液压装载机液压元件加工精度要求高、维修保养成本高、可靠度难保证、容易漏油等缺点,还能解决平面装载机只能实现平面内的轨迹输出,导致的动作不够灵活、工作空间有限、工作效率低等问题。
一种自调式可控机构式微型多自由度装载机构
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
一种自调式可控机构式微型多自由度装载机构,包括机架、动臂、铲斗翻转支链、动臂抬升支链、铲斗。动臂铰接在机架上,另一端铰接铲斗,铲斗翻转支链由伺服电机驱动,控制铲斗翻转,动臂抬升支链在伺服电机的驱动下控制动臂起降,配合铲斗翻转支链完成装载作业。由于该可控装载机构由安装在机架上的伺服电机驱动,工作装置易实现自动化、数控化控制,该机构结构更简单、造价低,承载能力高,更加适合制造小型微型装载机,而且避免了液压装载机液压元件制造成本高、维护保养复杂等缺点,同时与其它可控装载机构相比由于采用横梁设计,避免了两台伺服电机同时驱动动臂时由于不同步而产生的卡死以及刚性破坏。
一种3-3-1型七活动度空间液压挖掘机
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
一种3-3-1型五活动度空间液压挖掘机,包括三维转动臂机构、三维转动斗杆机构和一维转动铲斗机构。所述三维转动臂机构包括三维转动臂、第一液压缸、第二液压缸和第三液压缸,三维转动斗杆机构包括三维转动斗杆、第四液压缸、第五液压缸和第六液压缸,一维转动铲斗机构包括一维转动铲斗、第七液压缸、第一连杆和第二连杆。此种新型挖掘机的动臂和斗杆均能实现独立的空间三维转动,整个挖掘机能实现空间七活动度的运动,机构输出轨迹灵活、工作空间大、工作效率高,能在环境恶劣、空间狭小的施工工地以及需要快速挖掘、清障、平整的突发事故救援现场能发挥较好作用。