找到21项技术成果数据。
找技术 >
一种动力与控制相分离的高机动多功能无人飞行器
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
本实用新型公开了一种动力与控制相分离的高机动多功能无人飞行器,机身本体中部两侧对称安装有涡喷发动机,所述机身本体前部和后部两侧均对称安装有固定机翼,四个固定机翼的中部均安装有涵道风扇,四个涵道风扇上分别安装有圆形挡板,圆形挡板通过支撑杆连接有涡轮,涡轮通过涡杆连接有电动机的传动结构,四个涵道风扇上均安装有涵道风扇电机,机身本体中部内安装有蓄电池,蓄电池通过电源线与涵道风扇电机相连。本实用新型中蓄电池只用于给四个涵道风扇驱动电机供电,带动四个涵道风扇实现倾转,进而控制飞行器的姿态,不仅可以增加飞行器的航行时间,还可以减少用电量,进而减少电池的重量,减轻飞行器的重量,增加飞行器的承载能力。

无人飞行器快递燃料悬停加注技术和装置及实施方法
成熟度:正在研发
技术类型:发明
应用行业:制造业,交通运输、仓储和邮政业,电力、热力、燃气及水生产和供应业
技术简介
该发明目前授权未登记,截止时间,2018年8月14日 无人飞行器快递燃料悬停加注技术和装置及实施方法包括无人飞行器、燃料输送装置组件和智能加注枪,充分利用现代网络、人工智能和无人飞行器技术,解决道路交通工具随时随地补充加注燃料的需求,车主通过无线网络向运营平台发出燃料补充加注交易订单,无人飞行器按运营平台系统控制中心指令通过空中快递,悬垂加注,不受时间、地点限制,飞行直达、快捷高效、安全智能、无障碍地提供补充加注燃料的服务。

一种用于捕捉低空小型无人飞行器的便携式装置及其捕捉方法
成熟度:正在研发
技术类型:发明
应用行业:租赁和商务服务业
技术简介
摘要:本发明公开了用于捕捉低空小型无人飞行器的便携式装置及其捕捉方法,该装置包括发射机构和捕捉机构,其中发射机构包括气活塞、压气气缸、单向阀、手柄、气缸、启动阀、填弹阀门、触发扳机、发射管、膛线和瞄准机构;捕捉机构包括分体弹头和扑捉网。捕捉机构由气压推动高速发射后,利用自旋离心力,分体弹头将扑捉网张开,网面与发射路线垂直,捕捉有效面积最大,扑捉网接触到小型无人飞行后,会有效干扰螺旋桨工作,使其迫降。本装置便于携带,可在移动过程中使用,易于紧急事件处理,而且成本低,没有燃料或爆炸物质,使用安全。
一种羽翼变形仿生无人飞行器及变形控制方法
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
一种羽翼变形仿生无人飞行器及变形控制方法,该飞行器由螺旋桨、翼身融合翼段、伸缩翼段、折叠羽翼控制段、仿生羽翼和稳定尾翼段6大功能部件构成;通过伸缩翼段的伸缩和仿生羽翼的折叠两种基本变形仿生组合来模拟鸟儿翱翔时的气动构型,从而实现羽翼变形仿生无人机在城市、丛林、山地等复杂地形和狭小空间随机乱流低空超低空环境中机动灵活稳定飞行;为了克服传统固定翼或多旋翼无人机难以在复杂近地乱流环境中快速灵活稳定机动穿梭的困难。

一种油电混合无人飞行器供电系统测试平台及其测试方法
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
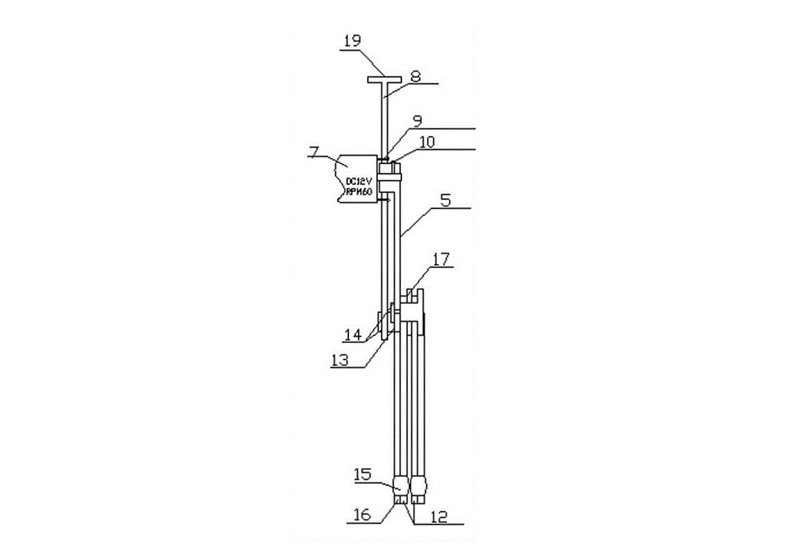
一种油电混合无人飞行器供电系统测试平台及其测试方法,油电混合无人飞行器供电系统测试平台包括发动机发电装置(1)、旋翼电机特性测试台(2)、信号调理装置(3)、用于调整电机转速的电子调速器(4)、用于信号采集的信号采集卡(5)以及上位机(6),所述发动机发电装置(1)包括发动机(7)、发电机(8)、转速传感器(9)和扭矩传感器(10),所述旋翼电机特性测试台(2)设有无人飞行器的旋翼(11)、电机(12)、力传感器(13)、速度传感器(14)和反扭矩传感器(15)。本发明提供了一种油电混合无人飞行器供电系统测试平台及测试方法,具有开发时间短,成本低等特点。

负载平台及设有该负载平台的无人飞行器
成熟度:-
技术类型:-
应用行业:制造业
技术简介
本发明公开了一种负载平台,包括支撑脚架、围框及底架,支撑脚架包括第一支撑脚架及相对第一支撑脚架设置的第二支撑脚架,第一支撑脚架与第二支撑脚架均包括降落部及设置于该降落部两端的支撑部; 围框包括第一连接件、第一横杆及第二横杆,第一连接件分别安装于第一支撑脚架的支撑部及第二支撑脚架的支撑部,第一横杆两端及第二横杆两端分别连接于第一连接件; 底架包括第二连接件及第三横杆,第二连接件分别安装于第一支撑脚架的降落部及第二支撑脚架的降落部,第三横杆两端分别连接于第二连接件。 如此,大型物件等物品可放置于该容置空间,装卸简单,且使用方便。 此外,增加了该负载平台的刚度及抗振性能。

低空无人飞行器航测遥感系统
成熟度:-
技术类型:-
应用行业:信息传输、软件和信息技术服务业
技术简介
内容简介:1.任务来源:(1)国土资源部重点科技项目《UAVRS-II型低空无人机遥感监测系统的研制》,项目号991017,项目起止时间1999年12月至2003年8月,项目经费200万元。项目验收时间2003年8月。(2)北京测科空间信息技术有限公司自筹经费40万元,研究开发应急测绘专用特轻型无人机系统和无人机载双相机低空航测系统,2008年。2.应用领域和技术原理(1)地政、矿政管理日常巡查监测需要高分辨率影像,而现今卫星遥感与有人驾驶飞机的普通航空摄影,经常受阻于阴云天气,达不到及时服务的要求;(2)大比例尺(1/2000、1/1000、1/500)地形图测绘,需要高分辨率、高清晰度的航空影像,而这种任务经常是呈小面积、星罗棋布的,普通航空摄影面对这类任务需求,显得效率太低;(3)防灾救灾和突发事件处置,需要应急测绘技术支持,这种应急测绘能力最好是全国分布式布局的,能在需要的时候,12小时内到达任务地点,24小时内提供应急测绘成果。该项目通过无人飞行器低空航测系统能获取低空、高分辨率、高清晰度影像的技术原理,解决上述应用难题。3.性能指标:无人飞行器低空航测系统(UAV-MAP)由无人飞行器飞行平台、特宽角组合相机、现代航测软件三个基本部分,加地面运载车、通信监测等辅助设备组成。它有三大技术特点:(1)无人飞行器飞得很低,低到离地面100米安全飞行;可以飞得很慢,以每小时30~100公里的速度航摄作业。因此可以获取到比其他有人驾驶飞行器都更清晰的航空影像,以高分辨率、高清晰度影像实现高精度摄影测量。(2)UAV专用宽角组合相机,具有自检校功能,能自动消除机械变形的影响,并且以视场角补偿的形式替代稳定平台,从而实现成像系统的轻小型化。(3)现代航测自动空三软件MAP-AT,突破传统航测在摄影比例尺、姿态角、重叠度等方面的限制,能够处理现有胶片相机、数码相机、组合宽角相机,通过普通飞机航摄、低空轻型机航摄、无人机航摄、无人飞艇航摄所获取的竖直摄影影像、交向摄影影像、倾斜影像以及复杂航线多基线摄影影像;通过多视影像匹配自动构建空中三角测量网,能进行多达10000片影像的大区域光束平差;配合低空遥感的高分辨率影像,实现高精度航测定位;能自动化生产数字高程模型(DEM)和数字正射影像(DOM)等产品。现代航测、影像测图及全野外采集数据制图和数据建库软件MAP-CS、MAP-CS的编图模块已升级到国标2008符号库。该系统的成功应用案例有:(1)大比例尺测图—采用无人飞艇、无人飞机航测系统获取乳山市470平方公里高分辨率影像,生产1:1000正射影像和1:1000地形图。(2)城市变化监测—用MAP-AT软件处理某城区两个年度的影像,以三维DSM方法自动发现超过2米的房屋拆建变化情况。(3)应急测绘—在24小时内完成广州市某城区从飞行到正射影像成果的全部内、外业工作。该系统技术具有下列推广应用前景:(1)防灾救灾与应急测绘;(2)新农村与小城镇建设;(3)地政与矿政日常巡查监测;(4)城市精细化管理与三维规划;(5)影像地籍;(6)线路工程测量。4.与国内外同类技术比较(1)该成果中无人机低空航测系统所采用双相机传感器系统,较国内外市场上的单相机无人机系统来说,航摄效率更高,产品的高程精度更高。(2)自主研发的特宽角组合相机,较之国内外先进产品,重量轻5~8倍,是唯一一款能在轻于20公斤荷载无人飞行器上使用的低空特宽角相机。(3)MAP-AT软件空中三角测量功能可与世界先进的软件相当,而且增添了大量适用于UAV影像的功能。5.成果的创新性(1)发明了具有自检校功能的特宽角组合相机,从而可以采用轻型材料结构,使相机重量大幅度减轻,并且采用了边缘视场补偿偏斜的技术,省去了三轴云台。(2)在国内首次利用无人飞艇、无人飞机低飞、低速的良好性能,获取高清晰度、高分辨率影像,达到1:1000测图规范标准。(3)利用MAP-AT功能实现城市建筑物变化的三维全自动化监测。(4)达到24小时完成内、外业全过程,提供正射影像产品的能力。6.作用意义(1)完成深圳大运、坪山、光明、龙华四个新城区总面积424Km'2的高分辨率影像获取任务,完成1:1000正射影像图制作,创收80万元。(2)此系统安全性好、易于操作,可推广到省、市级测绘队伍。7.推广应用范围防灾救灾与应急测绘;新农村与小城镇建设;地政与矿政日常巡查监测;城市精细管理和三维规划;影像地籍;线路工程测量。
一种应用于火灾现场情况勘测的耐高温自主无人飞行器系统
成熟度:正在研发
技术类型:实用新型
应用行业:租赁和商务服务业
技术简介
本实用新型公开了用于火灾现场情况勘测的耐高温自主无人飞行器系统。 耐高温自主无人飞行器系统包括外置主控制器(17)和飞行器模型(13);所述飞行器模型(13),包括机身(4)和云台支架(8),所述机身(4)上设置有呈十字分布的四个机翼(1),每个机翼(1)与无刷电机(2)相连,继而无刷电机(2)通过无刷电调(3)与机身(4)相连;机身(4)上方设置有飞行控制板(5)和飞行控制板安装棱柱(7;机身(4)下方设置有执行部件(10)和执行部件固定柱(9),执行部件(10)外部设置有耐高温隔热罩(11)。耐高温自主无人飞行器系统能够在未知的环境中自主飞行,稳定、安全、灵活的搜救被困群众。
一种具有旋翼和气囊复合动力无人飞行器
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
摘要:本实用新型公开了一种具有旋翼和气囊复合动力无人飞行器,是为解决无人机有效载荷小、续航时间较短、抗干扰能力弱等问题和航空物探技术在航空设备和飞行员上的不足而设计的。它主要包括气囊、四个旋翼机构、共轴双桨机构和吊舱。气囊为无人机提供主要升力、克服无人机有效载荷小的缺点。共轴双桨为飞行器提供上升时部分升力,亦可反向旋转提供下降压力,用于改变飞行的高度和升降控制。通过改变不同方位的四旋翼转速,可以及时调整飞行器的飞行方向,并为飞行器提供前飞动力,提高抗风性能。该飞行器不仅适用于航空物探领域,而且还能够航拍观察、农林作业、物质运输及抗震救灾等方面,具有重载、高效、稳定、安全、方便、低廉等优点。
一种多轴飞行器与人造扑翅飞行动物的搭载结构
成熟度:通过小试
技术类型:实用新型
应用行业:制造业
技术简介
本实用新型公开一种多轴飞行器与人造扑翅飞行动物的搭载结构,专利号201520556816.2。 研发目的:儿童成人玩具,机场、养鱼场、种子场驱鸟,牧场赶羊、赶牛等。 技术基本原理: 人造扑翅飞行动物,仿音、形及飞行动作,借助多轴无人飞行器,完成扑翅飞行动物运动动作,对鸟、羊、牛等产生威摄作用,达到实用经济目的。 一种多轴飞行器与人造扑翅飞行动物的搭载结构,包括安装于多轴飞行器下端的人造扑翅飞行动物,所述人造扑翅飞行动物包括一动物壳体,所述动物壳体内安装一曲柄揺杆机构;所述曲柄摇杆机构包括一曲柄,曲柄的上端贯穿开设一电机回转中心,所述电机回转中心内安装一微电机,位于曲柄的后端安装一悬挂架,所述微电机的后端设置一固定块,所述曲柄的下端开设一曲柄轴回转中心,所述曲柄轴回转中心内安装两连杆,连杆的上下端均开设一销轴孔。人造飞行动物用悬挂架固定在无人飞行器下方,飞行动物前进、上下、左右、悬停等由多轴飞行器操控,但地面观看效果犹如飞行动物扑翅飞行,如果应用到驱鸟和赶羊等,会产生很大的威摄作用。 预期效益:投资可大可小,50万-300万,一种多轴飞行器与人造扑翅飞行动物的搭载结构主要用于场地、模具、机电配件、无人飞行器购买,可从玩具开始,然后才做飞行搭载,由小到大,市场前景是看得见的,效益是会很不错的。最初投资300万,产生1000万的效益是可以期待的,后续会更好,市场会更大。







找到21项技术成果数据。
找技术 >一种动力与控制相分离的高机动多功能无人飞行器
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
本实用新型公开了一种动力与控制相分离的高机动多功能无人飞行器,机身本体中部两侧对称安装有涡喷发动机,所述机身本体前部和后部两侧均对称安装有固定机翼,四个固定机翼的中部均安装有涵道风扇,四个涵道风扇上分别安装有圆形挡板,圆形挡板通过支撑杆连接有涡轮,涡轮通过涡杆连接有电动机的传动结构,四个涵道风扇上均安装有涵道风扇电机,机身本体中部内安装有蓄电池,蓄电池通过电源线与涵道风扇电机相连。本实用新型中蓄电池只用于给四个涵道风扇驱动电机供电,带动四个涵道风扇实现倾转,进而控制飞行器的姿态,不仅可以增加飞行器的航行时间,还可以减少用电量,进而减少电池的重量,减轻飞行器的重量,增加飞行器的承载能力。
无人飞行器快递燃料悬停加注技术和装置及实施方法
成熟度:正在研发
技术类型:发明
应用行业:制造业,交通运输、仓储和邮政业,电力、热力、燃气及水生产和供应业
技术简介
该发明目前授权未登记,截止时间,2018年8月14日 无人飞行器快递燃料悬停加注技术和装置及实施方法包括无人飞行器、燃料输送装置组件和智能加注枪,充分利用现代网络、人工智能和无人飞行器技术,解决道路交通工具随时随地补充加注燃料的需求,车主通过无线网络向运营平台发出燃料补充加注交易订单,无人飞行器按运营平台系统控制中心指令通过空中快递,悬垂加注,不受时间、地点限制,飞行直达、快捷高效、安全智能、无障碍地提供补充加注燃料的服务。
一种用于捕捉低空小型无人飞行器的便携式装置及其捕捉方法
成熟度:正在研发
技术类型:发明
应用行业:租赁和商务服务业
技术简介
摘要:本发明公开了用于捕捉低空小型无人飞行器的便携式装置及其捕捉方法,该装置包括发射机构和捕捉机构,其中发射机构包括气活塞、压气气缸、单向阀、手柄、气缸、启动阀、填弹阀门、触发扳机、发射管、膛线和瞄准机构;捕捉机构包括分体弹头和扑捉网。捕捉机构由气压推动高速发射后,利用自旋离心力,分体弹头将扑捉网张开,网面与发射路线垂直,捕捉有效面积最大,扑捉网接触到小型无人飞行后,会有效干扰螺旋桨工作,使其迫降。本装置便于携带,可在移动过程中使用,易于紧急事件处理,而且成本低,没有燃料或爆炸物质,使用安全。
一种羽翼变形仿生无人飞行器及变形控制方法
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
一种羽翼变形仿生无人飞行器及变形控制方法,该飞行器由螺旋桨、翼身融合翼段、伸缩翼段、折叠羽翼控制段、仿生羽翼和稳定尾翼段6大功能部件构成;通过伸缩翼段的伸缩和仿生羽翼的折叠两种基本变形仿生组合来模拟鸟儿翱翔时的气动构型,从而实现羽翼变形仿生无人机在城市、丛林、山地等复杂地形和狭小空间随机乱流低空超低空环境中机动灵活稳定飞行;为了克服传统固定翼或多旋翼无人机难以在复杂近地乱流环境中快速灵活稳定机动穿梭的困难。
一种油电混合无人飞行器供电系统测试平台及其测试方法
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
一种油电混合无人飞行器供电系统测试平台及其测试方法,油电混合无人飞行器供电系统测试平台包括发动机发电装置(1)、旋翼电机特性测试台(2)、信号调理装置(3)、用于调整电机转速的电子调速器(4)、用于信号采集的信号采集卡(5)以及上位机(6),所述发动机发电装置(1)包括发动机(7)、发电机(8)、转速传感器(9)和扭矩传感器(10),所述旋翼电机特性测试台(2)设有无人飞行器的旋翼(11)、电机(12)、力传感器(13)、速度传感器(14)和反扭矩传感器(15)。本发明提供了一种油电混合无人飞行器供电系统测试平台及测试方法,具有开发时间短,成本低等特点。
负载平台及设有该负载平台的无人飞行器
成熟度:-
技术类型:-
应用行业:制造业
技术简介
本发明公开了一种负载平台,包括支撑脚架、围框及底架,支撑脚架包括第一支撑脚架及相对第一支撑脚架设置的第二支撑脚架,第一支撑脚架与第二支撑脚架均包括降落部及设置于该降落部两端的支撑部; 围框包括第一连接件、第一横杆及第二横杆,第一连接件分别安装于第一支撑脚架的支撑部及第二支撑脚架的支撑部,第一横杆两端及第二横杆两端分别连接于第一连接件; 底架包括第二连接件及第三横杆,第二连接件分别安装于第一支撑脚架的降落部及第二支撑脚架的降落部,第三横杆两端分别连接于第二连接件。 如此,大型物件等物品可放置于该容置空间,装卸简单,且使用方便。 此外,增加了该负载平台的刚度及抗振性能。
低空无人飞行器航测遥感系统
成熟度:-
技术类型:-
应用行业:信息传输、软件和信息技术服务业
技术简介
内容简介:1.任务来源:(1)国土资源部重点科技项目《UAVRS-II型低空无人机遥感监测系统的研制》,项目号991017,项目起止时间1999年12月至2003年8月,项目经费200万元。项目验收时间2003年8月。(2)北京测科空间信息技术有限公司自筹经费40万元,研究开发应急测绘专用特轻型无人机系统和无人机载双相机低空航测系统,2008年。2.应用领域和技术原理(1)地政、矿政管理日常巡查监测需要高分辨率影像,而现今卫星遥感与有人驾驶飞机的普通航空摄影,经常受阻于阴云天气,达不到及时服务的要求;(2)大比例尺(1/2000、1/1000、1/500)地形图测绘,需要高分辨率、高清晰度的航空影像,而这种任务经常是呈小面积、星罗棋布的,普通航空摄影面对这类任务需求,显得效率太低;(3)防灾救灾和突发事件处置,需要应急测绘技术支持,这种应急测绘能力最好是全国分布式布局的,能在需要的时候,12小时内到达任务地点,24小时内提供应急测绘成果。该项目通过无人飞行器低空航测系统能获取低空、高分辨率、高清晰度影像的技术原理,解决上述应用难题。3.性能指标:无人飞行器低空航测系统(UAV-MAP)由无人飞行器飞行平台、特宽角组合相机、现代航测软件三个基本部分,加地面运载车、通信监测等辅助设备组成。它有三大技术特点:(1)无人飞行器飞得很低,低到离地面100米安全飞行;可以飞得很慢,以每小时30~100公里的速度航摄作业。因此可以获取到比其他有人驾驶飞行器都更清晰的航空影像,以高分辨率、高清晰度影像实现高精度摄影测量。(2)UAV专用宽角组合相机,具有自检校功能,能自动消除机械变形的影响,并且以视场角补偿的形式替代稳定平台,从而实现成像系统的轻小型化。(3)现代航测自动空三软件MAP-AT,突破传统航测在摄影比例尺、姿态角、重叠度等方面的限制,能够处理现有胶片相机、数码相机、组合宽角相机,通过普通飞机航摄、低空轻型机航摄、无人机航摄、无人飞艇航摄所获取的竖直摄影影像、交向摄影影像、倾斜影像以及复杂航线多基线摄影影像;通过多视影像匹配自动构建空中三角测量网,能进行多达10000片影像的大区域光束平差;配合低空遥感的高分辨率影像,实现高精度航测定位;能自动化生产数字高程模型(DEM)和数字正射影像(DOM)等产品。现代航测、影像测图及全野外采集数据制图和数据建库软件MAP-CS、MAP-CS的编图模块已升级到国标2008符号库。该系统的成功应用案例有:(1)大比例尺测图—采用无人飞艇、无人飞机航测系统获取乳山市470平方公里高分辨率影像,生产1:1000正射影像和1:1000地形图。(2)城市变化监测—用MAP-AT软件处理某城区两个年度的影像,以三维DSM方法自动发现超过2米的房屋拆建变化情况。(3)应急测绘—在24小时内完成广州市某城区从飞行到正射影像成果的全部内、外业工作。该系统技术具有下列推广应用前景:(1)防灾救灾与应急测绘;(2)新农村与小城镇建设;(3)地政与矿政日常巡查监测;(4)城市精细化管理与三维规划;(5)影像地籍;(6)线路工程测量。4.与国内外同类技术比较(1)该成果中无人机低空航测系统所采用双相机传感器系统,较国内外市场上的单相机无人机系统来说,航摄效率更高,产品的高程精度更高。(2)自主研发的特宽角组合相机,较之国内外先进产品,重量轻5~8倍,是唯一一款能在轻于20公斤荷载无人飞行器上使用的低空特宽角相机。(3)MAP-AT软件空中三角测量功能可与世界先进的软件相当,而且增添了大量适用于UAV影像的功能。5.成果的创新性(1)发明了具有自检校功能的特宽角组合相机,从而可以采用轻型材料结构,使相机重量大幅度减轻,并且采用了边缘视场补偿偏斜的技术,省去了三轴云台。(2)在国内首次利用无人飞艇、无人飞机低飞、低速的良好性能,获取高清晰度、高分辨率影像,达到1:1000测图规范标准。(3)利用MAP-AT功能实现城市建筑物变化的三维全自动化监测。(4)达到24小时完成内、外业全过程,提供正射影像产品的能力。6.作用意义(1)完成深圳大运、坪山、光明、龙华四个新城区总面积424Km'2的高分辨率影像获取任务,完成1:1000正射影像图制作,创收80万元。(2)此系统安全性好、易于操作,可推广到省、市级测绘队伍。7.推广应用范围防灾救灾与应急测绘;新农村与小城镇建设;地政与矿政日常巡查监测;城市精细管理和三维规划;影像地籍;线路工程测量。
一种应用于火灾现场情况勘测的耐高温自主无人飞行器系统
成熟度:正在研发
技术类型:实用新型
应用行业:租赁和商务服务业
技术简介
本实用新型公开了用于火灾现场情况勘测的耐高温自主无人飞行器系统。 耐高温自主无人飞行器系统包括外置主控制器(17)和飞行器模型(13);所述飞行器模型(13),包括机身(4)和云台支架(8),所述机身(4)上设置有呈十字分布的四个机翼(1),每个机翼(1)与无刷电机(2)相连,继而无刷电机(2)通过无刷电调(3)与机身(4)相连;机身(4)上方设置有飞行控制板(5)和飞行控制板安装棱柱(7;机身(4)下方设置有执行部件(10)和执行部件固定柱(9),执行部件(10)外部设置有耐高温隔热罩(11)。耐高温自主无人飞行器系统能够在未知的环境中自主飞行,稳定、安全、灵活的搜救被困群众。
一种具有旋翼和气囊复合动力无人飞行器
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
摘要:本实用新型公开了一种具有旋翼和气囊复合动力无人飞行器,是为解决无人机有效载荷小、续航时间较短、抗干扰能力弱等问题和航空物探技术在航空设备和飞行员上的不足而设计的。它主要包括气囊、四个旋翼机构、共轴双桨机构和吊舱。气囊为无人机提供主要升力、克服无人机有效载荷小的缺点。共轴双桨为飞行器提供上升时部分升力,亦可反向旋转提供下降压力,用于改变飞行的高度和升降控制。通过改变不同方位的四旋翼转速,可以及时调整飞行器的飞行方向,并为飞行器提供前飞动力,提高抗风性能。该飞行器不仅适用于航空物探领域,而且还能够航拍观察、农林作业、物质运输及抗震救灾等方面,具有重载、高效、稳定、安全、方便、低廉等优点。
一种多轴飞行器与人造扑翅飞行动物的搭载结构
成熟度:通过小试
技术类型:实用新型
应用行业:制造业
技术简介
本实用新型公开一种多轴飞行器与人造扑翅飞行动物的搭载结构,专利号201520556816.2。 研发目的:儿童成人玩具,机场、养鱼场、种子场驱鸟,牧场赶羊、赶牛等。 技术基本原理: 人造扑翅飞行动物,仿音、形及飞行动作,借助多轴无人飞行器,完成扑翅飞行动物运动动作,对鸟、羊、牛等产生威摄作用,达到实用经济目的。 一种多轴飞行器与人造扑翅飞行动物的搭载结构,包括安装于多轴飞行器下端的人造扑翅飞行动物,所述人造扑翅飞行动物包括一动物壳体,所述动物壳体内安装一曲柄揺杆机构;所述曲柄摇杆机构包括一曲柄,曲柄的上端贯穿开设一电机回转中心,所述电机回转中心内安装一微电机,位于曲柄的后端安装一悬挂架,所述微电机的后端设置一固定块,所述曲柄的下端开设一曲柄轴回转中心,所述曲柄轴回转中心内安装两连杆,连杆的上下端均开设一销轴孔。人造飞行动物用悬挂架固定在无人飞行器下方,飞行动物前进、上下、左右、悬停等由多轴飞行器操控,但地面观看效果犹如飞行动物扑翅飞行,如果应用到驱鸟和赶羊等,会产生很大的威摄作用。 预期效益:投资可大可小,50万-300万,一种多轴飞行器与人造扑翅飞行动物的搭载结构主要用于场地、模具、机电配件、无人飞行器购买,可从玩具开始,然后才做飞行搭载,由小到大,市场前景是看得见的,效益是会很不错的。最初投资300万,产生1000万的效益是可以期待的,后续会更好,市场会更大。
找到21项技术成果数据。
找技术 >一种动力与控制相分离的高机动多功能无人飞行器
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
本实用新型公开了一种动力与控制相分离的高机动多功能无人飞行器,机身本体中部两侧对称安装有涡喷发动机,所述机身本体前部和后部两侧均对称安装有固定机翼,四个固定机翼的中部均安装有涵道风扇,四个涵道风扇上分别安装有圆形挡板,圆形挡板通过支撑杆连接有涡轮,涡轮通过涡杆连接有电动机的传动结构,四个涵道风扇上均安装有涵道风扇电机,机身本体中部内安装有蓄电池,蓄电池通过电源线与涵道风扇电机相连。本实用新型中蓄电池只用于给四个涵道风扇驱动电机供电,带动四个涵道风扇实现倾转,进而控制飞行器的姿态,不仅可以增加飞行器的航行时间,还可以减少用电量,进而减少电池的重量,减轻飞行器的重量,增加飞行器的承载能力。
无人飞行器快递燃料悬停加注技术和装置及实施方法
成熟度:正在研发
技术类型:发明
应用行业:制造业,交通运输、仓储和邮政业,电力、热力、燃气及水生产和供应业
技术简介
该发明目前授权未登记,截止时间,2018年8月14日 无人飞行器快递燃料悬停加注技术和装置及实施方法包括无人飞行器、燃料输送装置组件和智能加注枪,充分利用现代网络、人工智能和无人飞行器技术,解决道路交通工具随时随地补充加注燃料的需求,车主通过无线网络向运营平台发出燃料补充加注交易订单,无人飞行器按运营平台系统控制中心指令通过空中快递,悬垂加注,不受时间、地点限制,飞行直达、快捷高效、安全智能、无障碍地提供补充加注燃料的服务。
一种用于捕捉低空小型无人飞行器的便携式装置及其捕捉方法
成熟度:正在研发
技术类型:发明
应用行业:租赁和商务服务业
技术简介
摘要:本发明公开了用于捕捉低空小型无人飞行器的便携式装置及其捕捉方法,该装置包括发射机构和捕捉机构,其中发射机构包括气活塞、压气气缸、单向阀、手柄、气缸、启动阀、填弹阀门、触发扳机、发射管、膛线和瞄准机构;捕捉机构包括分体弹头和扑捉网。捕捉机构由气压推动高速发射后,利用自旋离心力,分体弹头将扑捉网张开,网面与发射路线垂直,捕捉有效面积最大,扑捉网接触到小型无人飞行后,会有效干扰螺旋桨工作,使其迫降。本装置便于携带,可在移动过程中使用,易于紧急事件处理,而且成本低,没有燃料或爆炸物质,使用安全。
一种羽翼变形仿生无人飞行器及变形控制方法
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
一种羽翼变形仿生无人飞行器及变形控制方法,该飞行器由螺旋桨、翼身融合翼段、伸缩翼段、折叠羽翼控制段、仿生羽翼和稳定尾翼段6大功能部件构成;通过伸缩翼段的伸缩和仿生羽翼的折叠两种基本变形仿生组合来模拟鸟儿翱翔时的气动构型,从而实现羽翼变形仿生无人机在城市、丛林、山地等复杂地形和狭小空间随机乱流低空超低空环境中机动灵活稳定飞行;为了克服传统固定翼或多旋翼无人机难以在复杂近地乱流环境中快速灵活稳定机动穿梭的困难。
一种油电混合无人飞行器供电系统测试平台及其测试方法
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
一种油电混合无人飞行器供电系统测试平台及其测试方法,油电混合无人飞行器供电系统测试平台包括发动机发电装置(1)、旋翼电机特性测试台(2)、信号调理装置(3)、用于调整电机转速的电子调速器(4)、用于信号采集的信号采集卡(5)以及上位机(6),所述发动机发电装置(1)包括发动机(7)、发电机(8)、转速传感器(9)和扭矩传感器(10),所述旋翼电机特性测试台(2)设有无人飞行器的旋翼(11)、电机(12)、力传感器(13)、速度传感器(14)和反扭矩传感器(15)。本发明提供了一种油电混合无人飞行器供电系统测试平台及测试方法,具有开发时间短,成本低等特点。
负载平台及设有该负载平台的无人飞行器
成熟度:-
技术类型:-
应用行业:制造业
技术简介
本发明公开了一种负载平台,包括支撑脚架、围框及底架,支撑脚架包括第一支撑脚架及相对第一支撑脚架设置的第二支撑脚架,第一支撑脚架与第二支撑脚架均包括降落部及设置于该降落部两端的支撑部; 围框包括第一连接件、第一横杆及第二横杆,第一连接件分别安装于第一支撑脚架的支撑部及第二支撑脚架的支撑部,第一横杆两端及第二横杆两端分别连接于第一连接件; 底架包括第二连接件及第三横杆,第二连接件分别安装于第一支撑脚架的降落部及第二支撑脚架的降落部,第三横杆两端分别连接于第二连接件。 如此,大型物件等物品可放置于该容置空间,装卸简单,且使用方便。 此外,增加了该负载平台的刚度及抗振性能。
低空无人飞行器航测遥感系统
成熟度:-
技术类型:-
应用行业:信息传输、软件和信息技术服务业
技术简介
内容简介:1.任务来源:(1)国土资源部重点科技项目《UAVRS-II型低空无人机遥感监测系统的研制》,项目号991017,项目起止时间1999年12月至2003年8月,项目经费200万元。项目验收时间2003年8月。(2)北京测科空间信息技术有限公司自筹经费40万元,研究开发应急测绘专用特轻型无人机系统和无人机载双相机低空航测系统,2008年。2.应用领域和技术原理(1)地政、矿政管理日常巡查监测需要高分辨率影像,而现今卫星遥感与有人驾驶飞机的普通航空摄影,经常受阻于阴云天气,达不到及时服务的要求;(2)大比例尺(1/2000、1/1000、1/500)地形图测绘,需要高分辨率、高清晰度的航空影像,而这种任务经常是呈小面积、星罗棋布的,普通航空摄影面对这类任务需求,显得效率太低;(3)防灾救灾和突发事件处置,需要应急测绘技术支持,这种应急测绘能力最好是全国分布式布局的,能在需要的时候,12小时内到达任务地点,24小时内提供应急测绘成果。该项目通过无人飞行器低空航测系统能获取低空、高分辨率、高清晰度影像的技术原理,解决上述应用难题。3.性能指标:无人飞行器低空航测系统(UAV-MAP)由无人飞行器飞行平台、特宽角组合相机、现代航测软件三个基本部分,加地面运载车、通信监测等辅助设备组成。它有三大技术特点:(1)无人飞行器飞得很低,低到离地面100米安全飞行;可以飞得很慢,以每小时30~100公里的速度航摄作业。因此可以获取到比其他有人驾驶飞行器都更清晰的航空影像,以高分辨率、高清晰度影像实现高精度摄影测量。(2)UAV专用宽角组合相机,具有自检校功能,能自动消除机械变形的影响,并且以视场角补偿的形式替代稳定平台,从而实现成像系统的轻小型化。(3)现代航测自动空三软件MAP-AT,突破传统航测在摄影比例尺、姿态角、重叠度等方面的限制,能够处理现有胶片相机、数码相机、组合宽角相机,通过普通飞机航摄、低空轻型机航摄、无人机航摄、无人飞艇航摄所获取的竖直摄影影像、交向摄影影像、倾斜影像以及复杂航线多基线摄影影像;通过多视影像匹配自动构建空中三角测量网,能进行多达10000片影像的大区域光束平差;配合低空遥感的高分辨率影像,实现高精度航测定位;能自动化生产数字高程模型(DEM)和数字正射影像(DOM)等产品。现代航测、影像测图及全野外采集数据制图和数据建库软件MAP-CS、MAP-CS的编图模块已升级到国标2008符号库。该系统的成功应用案例有:(1)大比例尺测图—采用无人飞艇、无人飞机航测系统获取乳山市470平方公里高分辨率影像,生产1:1000正射影像和1:1000地形图。(2)城市变化监测—用MAP-AT软件处理某城区两个年度的影像,以三维DSM方法自动发现超过2米的房屋拆建变化情况。(3)应急测绘—在24小时内完成广州市某城区从飞行到正射影像成果的全部内、外业工作。该系统技术具有下列推广应用前景:(1)防灾救灾与应急测绘;(2)新农村与小城镇建设;(3)地政与矿政日常巡查监测;(4)城市精细化管理与三维规划;(5)影像地籍;(6)线路工程测量。4.与国内外同类技术比较(1)该成果中无人机低空航测系统所采用双相机传感器系统,较国内外市场上的单相机无人机系统来说,航摄效率更高,产品的高程精度更高。(2)自主研发的特宽角组合相机,较之国内外先进产品,重量轻5~8倍,是唯一一款能在轻于20公斤荷载无人飞行器上使用的低空特宽角相机。(3)MAP-AT软件空中三角测量功能可与世界先进的软件相当,而且增添了大量适用于UAV影像的功能。5.成果的创新性(1)发明了具有自检校功能的特宽角组合相机,从而可以采用轻型材料结构,使相机重量大幅度减轻,并且采用了边缘视场补偿偏斜的技术,省去了三轴云台。(2)在国内首次利用无人飞艇、无人飞机低飞、低速的良好性能,获取高清晰度、高分辨率影像,达到1:1000测图规范标准。(3)利用MAP-AT功能实现城市建筑物变化的三维全自动化监测。(4)达到24小时完成内、外业全过程,提供正射影像产品的能力。6.作用意义(1)完成深圳大运、坪山、光明、龙华四个新城区总面积424Km'2的高分辨率影像获取任务,完成1:1000正射影像图制作,创收80万元。(2)此系统安全性好、易于操作,可推广到省、市级测绘队伍。7.推广应用范围防灾救灾与应急测绘;新农村与小城镇建设;地政与矿政日常巡查监测;城市精细管理和三维规划;影像地籍;线路工程测量。
一种应用于火灾现场情况勘测的耐高温自主无人飞行器系统
成熟度:正在研发
技术类型:实用新型
应用行业:租赁和商务服务业
技术简介
本实用新型公开了用于火灾现场情况勘测的耐高温自主无人飞行器系统。 耐高温自主无人飞行器系统包括外置主控制器(17)和飞行器模型(13);所述飞行器模型(13),包括机身(4)和云台支架(8),所述机身(4)上设置有呈十字分布的四个机翼(1),每个机翼(1)与无刷电机(2)相连,继而无刷电机(2)通过无刷电调(3)与机身(4)相连;机身(4)上方设置有飞行控制板(5)和飞行控制板安装棱柱(7;机身(4)下方设置有执行部件(10)和执行部件固定柱(9),执行部件(10)外部设置有耐高温隔热罩(11)。耐高温自主无人飞行器系统能够在未知的环境中自主飞行,稳定、安全、灵活的搜救被困群众。
一种具有旋翼和气囊复合动力无人飞行器
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
摘要:本实用新型公开了一种具有旋翼和气囊复合动力无人飞行器,是为解决无人机有效载荷小、续航时间较短、抗干扰能力弱等问题和航空物探技术在航空设备和飞行员上的不足而设计的。它主要包括气囊、四个旋翼机构、共轴双桨机构和吊舱。气囊为无人机提供主要升力、克服无人机有效载荷小的缺点。共轴双桨为飞行器提供上升时部分升力,亦可反向旋转提供下降压力,用于改变飞行的高度和升降控制。通过改变不同方位的四旋翼转速,可以及时调整飞行器的飞行方向,并为飞行器提供前飞动力,提高抗风性能。该飞行器不仅适用于航空物探领域,而且还能够航拍观察、农林作业、物质运输及抗震救灾等方面,具有重载、高效、稳定、安全、方便、低廉等优点。
一种多轴飞行器与人造扑翅飞行动物的搭载结构
成熟度:通过小试
技术类型:实用新型
应用行业:制造业
技术简介
本实用新型公开一种多轴飞行器与人造扑翅飞行动物的搭载结构,专利号201520556816.2。 研发目的:儿童成人玩具,机场、养鱼场、种子场驱鸟,牧场赶羊、赶牛等。 技术基本原理: 人造扑翅飞行动物,仿音、形及飞行动作,借助多轴无人飞行器,完成扑翅飞行动物运动动作,对鸟、羊、牛等产生威摄作用,达到实用经济目的。 一种多轴飞行器与人造扑翅飞行动物的搭载结构,包括安装于多轴飞行器下端的人造扑翅飞行动物,所述人造扑翅飞行动物包括一动物壳体,所述动物壳体内安装一曲柄揺杆机构;所述曲柄摇杆机构包括一曲柄,曲柄的上端贯穿开设一电机回转中心,所述电机回转中心内安装一微电机,位于曲柄的后端安装一悬挂架,所述微电机的后端设置一固定块,所述曲柄的下端开设一曲柄轴回转中心,所述曲柄轴回转中心内安装两连杆,连杆的上下端均开设一销轴孔。人造飞行动物用悬挂架固定在无人飞行器下方,飞行动物前进、上下、左右、悬停等由多轴飞行器操控,但地面观看效果犹如飞行动物扑翅飞行,如果应用到驱鸟和赶羊等,会产生很大的威摄作用。 预期效益:投资可大可小,50万-300万,一种多轴飞行器与人造扑翅飞行动物的搭载结构主要用于场地、模具、机电配件、无人飞行器购买,可从玩具开始,然后才做飞行搭载,由小到大,市场前景是看得见的,效益是会很不错的。最初投资300万,产生1000万的效益是可以期待的,后续会更好,市场会更大。
找到21项技术成果数据。
找技术 >一种动力与控制相分离的高机动多功能无人飞行器
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
本实用新型公开了一种动力与控制相分离的高机动多功能无人飞行器,机身本体中部两侧对称安装有涡喷发动机,所述机身本体前部和后部两侧均对称安装有固定机翼,四个固定机翼的中部均安装有涵道风扇,四个涵道风扇上分别安装有圆形挡板,圆形挡板通过支撑杆连接有涡轮,涡轮通过涡杆连接有电动机的传动结构,四个涵道风扇上均安装有涵道风扇电机,机身本体中部内安装有蓄电池,蓄电池通过电源线与涵道风扇电机相连。本实用新型中蓄电池只用于给四个涵道风扇驱动电机供电,带动四个涵道风扇实现倾转,进而控制飞行器的姿态,不仅可以增加飞行器的航行时间,还可以减少用电量,进而减少电池的重量,减轻飞行器的重量,增加飞行器的承载能力。
无人飞行器快递燃料悬停加注技术和装置及实施方法
成熟度:正在研发
技术类型:发明
应用行业:制造业,交通运输、仓储和邮政业,电力、热力、燃气及水生产和供应业
技术简介
该发明目前授权未登记,截止时间,2018年8月14日 无人飞行器快递燃料悬停加注技术和装置及实施方法包括无人飞行器、燃料输送装置组件和智能加注枪,充分利用现代网络、人工智能和无人飞行器技术,解决道路交通工具随时随地补充加注燃料的需求,车主通过无线网络向运营平台发出燃料补充加注交易订单,无人飞行器按运营平台系统控制中心指令通过空中快递,悬垂加注,不受时间、地点限制,飞行直达、快捷高效、安全智能、无障碍地提供补充加注燃料的服务。
一种用于捕捉低空小型无人飞行器的便携式装置及其捕捉方法
成熟度:正在研发
技术类型:发明
应用行业:租赁和商务服务业
技术简介
摘要:本发明公开了用于捕捉低空小型无人飞行器的便携式装置及其捕捉方法,该装置包括发射机构和捕捉机构,其中发射机构包括气活塞、压气气缸、单向阀、手柄、气缸、启动阀、填弹阀门、触发扳机、发射管、膛线和瞄准机构;捕捉机构包括分体弹头和扑捉网。捕捉机构由气压推动高速发射后,利用自旋离心力,分体弹头将扑捉网张开,网面与发射路线垂直,捕捉有效面积最大,扑捉网接触到小型无人飞行后,会有效干扰螺旋桨工作,使其迫降。本装置便于携带,可在移动过程中使用,易于紧急事件处理,而且成本低,没有燃料或爆炸物质,使用安全。
一种羽翼变形仿生无人飞行器及变形控制方法
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
一种羽翼变形仿生无人飞行器及变形控制方法,该飞行器由螺旋桨、翼身融合翼段、伸缩翼段、折叠羽翼控制段、仿生羽翼和稳定尾翼段6大功能部件构成;通过伸缩翼段的伸缩和仿生羽翼的折叠两种基本变形仿生组合来模拟鸟儿翱翔时的气动构型,从而实现羽翼变形仿生无人机在城市、丛林、山地等复杂地形和狭小空间随机乱流低空超低空环境中机动灵活稳定飞行;为了克服传统固定翼或多旋翼无人机难以在复杂近地乱流环境中快速灵活稳定机动穿梭的困难。
一种油电混合无人飞行器供电系统测试平台及其测试方法
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
一种油电混合无人飞行器供电系统测试平台及其测试方法,油电混合无人飞行器供电系统测试平台包括发动机发电装置(1)、旋翼电机特性测试台(2)、信号调理装置(3)、用于调整电机转速的电子调速器(4)、用于信号采集的信号采集卡(5)以及上位机(6),所述发动机发电装置(1)包括发动机(7)、发电机(8)、转速传感器(9)和扭矩传感器(10),所述旋翼电机特性测试台(2)设有无人飞行器的旋翼(11)、电机(12)、力传感器(13)、速度传感器(14)和反扭矩传感器(15)。本发明提供了一种油电混合无人飞行器供电系统测试平台及测试方法,具有开发时间短,成本低等特点。
负载平台及设有该负载平台的无人飞行器
成熟度:-
技术类型:-
应用行业:制造业
技术简介
本发明公开了一种负载平台,包括支撑脚架、围框及底架,支撑脚架包括第一支撑脚架及相对第一支撑脚架设置的第二支撑脚架,第一支撑脚架与第二支撑脚架均包括降落部及设置于该降落部两端的支撑部; 围框包括第一连接件、第一横杆及第二横杆,第一连接件分别安装于第一支撑脚架的支撑部及第二支撑脚架的支撑部,第一横杆两端及第二横杆两端分别连接于第一连接件; 底架包括第二连接件及第三横杆,第二连接件分别安装于第一支撑脚架的降落部及第二支撑脚架的降落部,第三横杆两端分别连接于第二连接件。 如此,大型物件等物品可放置于该容置空间,装卸简单,且使用方便。 此外,增加了该负载平台的刚度及抗振性能。
低空无人飞行器航测遥感系统
成熟度:-
技术类型:-
应用行业:信息传输、软件和信息技术服务业
技术简介
内容简介:1.任务来源:(1)国土资源部重点科技项目《UAVRS-II型低空无人机遥感监测系统的研制》,项目号991017,项目起止时间1999年12月至2003年8月,项目经费200万元。项目验收时间2003年8月。(2)北京测科空间信息技术有限公司自筹经费40万元,研究开发应急测绘专用特轻型无人机系统和无人机载双相机低空航测系统,2008年。2.应用领域和技术原理(1)地政、矿政管理日常巡查监测需要高分辨率影像,而现今卫星遥感与有人驾驶飞机的普通航空摄影,经常受阻于阴云天气,达不到及时服务的要求;(2)大比例尺(1/2000、1/1000、1/500)地形图测绘,需要高分辨率、高清晰度的航空影像,而这种任务经常是呈小面积、星罗棋布的,普通航空摄影面对这类任务需求,显得效率太低;(3)防灾救灾和突发事件处置,需要应急测绘技术支持,这种应急测绘能力最好是全国分布式布局的,能在需要的时候,12小时内到达任务地点,24小时内提供应急测绘成果。该项目通过无人飞行器低空航测系统能获取低空、高分辨率、高清晰度影像的技术原理,解决上述应用难题。3.性能指标:无人飞行器低空航测系统(UAV-MAP)由无人飞行器飞行平台、特宽角组合相机、现代航测软件三个基本部分,加地面运载车、通信监测等辅助设备组成。它有三大技术特点:(1)无人飞行器飞得很低,低到离地面100米安全飞行;可以飞得很慢,以每小时30~100公里的速度航摄作业。因此可以获取到比其他有人驾驶飞行器都更清晰的航空影像,以高分辨率、高清晰度影像实现高精度摄影测量。(2)UAV专用宽角组合相机,具有自检校功能,能自动消除机械变形的影响,并且以视场角补偿的形式替代稳定平台,从而实现成像系统的轻小型化。(3)现代航测自动空三软件MAP-AT,突破传统航测在摄影比例尺、姿态角、重叠度等方面的限制,能够处理现有胶片相机、数码相机、组合宽角相机,通过普通飞机航摄、低空轻型机航摄、无人机航摄、无人飞艇航摄所获取的竖直摄影影像、交向摄影影像、倾斜影像以及复杂航线多基线摄影影像;通过多视影像匹配自动构建空中三角测量网,能进行多达10000片影像的大区域光束平差;配合低空遥感的高分辨率影像,实现高精度航测定位;能自动化生产数字高程模型(DEM)和数字正射影像(DOM)等产品。现代航测、影像测图及全野外采集数据制图和数据建库软件MAP-CS、MAP-CS的编图模块已升级到国标2008符号库。该系统的成功应用案例有:(1)大比例尺测图—采用无人飞艇、无人飞机航测系统获取乳山市470平方公里高分辨率影像,生产1:1000正射影像和1:1000地形图。(2)城市变化监测—用MAP-AT软件处理某城区两个年度的影像,以三维DSM方法自动发现超过2米的房屋拆建变化情况。(3)应急测绘—在24小时内完成广州市某城区从飞行到正射影像成果的全部内、外业工作。该系统技术具有下列推广应用前景:(1)防灾救灾与应急测绘;(2)新农村与小城镇建设;(3)地政与矿政日常巡查监测;(4)城市精细化管理与三维规划;(5)影像地籍;(6)线路工程测量。4.与国内外同类技术比较(1)该成果中无人机低空航测系统所采用双相机传感器系统,较国内外市场上的单相机无人机系统来说,航摄效率更高,产品的高程精度更高。(2)自主研发的特宽角组合相机,较之国内外先进产品,重量轻5~8倍,是唯一一款能在轻于20公斤荷载无人飞行器上使用的低空特宽角相机。(3)MAP-AT软件空中三角测量功能可与世界先进的软件相当,而且增添了大量适用于UAV影像的功能。5.成果的创新性(1)发明了具有自检校功能的特宽角组合相机,从而可以采用轻型材料结构,使相机重量大幅度减轻,并且采用了边缘视场补偿偏斜的技术,省去了三轴云台。(2)在国内首次利用无人飞艇、无人飞机低飞、低速的良好性能,获取高清晰度、高分辨率影像,达到1:1000测图规范标准。(3)利用MAP-AT功能实现城市建筑物变化的三维全自动化监测。(4)达到24小时完成内、外业全过程,提供正射影像产品的能力。6.作用意义(1)完成深圳大运、坪山、光明、龙华四个新城区总面积424Km'2的高分辨率影像获取任务,完成1:1000正射影像图制作,创收80万元。(2)此系统安全性好、易于操作,可推广到省、市级测绘队伍。7.推广应用范围防灾救灾与应急测绘;新农村与小城镇建设;地政与矿政日常巡查监测;城市精细管理和三维规划;影像地籍;线路工程测量。
一种应用于火灾现场情况勘测的耐高温自主无人飞行器系统
成熟度:正在研发
技术类型:实用新型
应用行业:租赁和商务服务业
技术简介
本实用新型公开了用于火灾现场情况勘测的耐高温自主无人飞行器系统。 耐高温自主无人飞行器系统包括外置主控制器(17)和飞行器模型(13);所述飞行器模型(13),包括机身(4)和云台支架(8),所述机身(4)上设置有呈十字分布的四个机翼(1),每个机翼(1)与无刷电机(2)相连,继而无刷电机(2)通过无刷电调(3)与机身(4)相连;机身(4)上方设置有飞行控制板(5)和飞行控制板安装棱柱(7;机身(4)下方设置有执行部件(10)和执行部件固定柱(9),执行部件(10)外部设置有耐高温隔热罩(11)。耐高温自主无人飞行器系统能够在未知的环境中自主飞行,稳定、安全、灵活的搜救被困群众。
一种具有旋翼和气囊复合动力无人飞行器
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
摘要:本实用新型公开了一种具有旋翼和气囊复合动力无人飞行器,是为解决无人机有效载荷小、续航时间较短、抗干扰能力弱等问题和航空物探技术在航空设备和飞行员上的不足而设计的。它主要包括气囊、四个旋翼机构、共轴双桨机构和吊舱。气囊为无人机提供主要升力、克服无人机有效载荷小的缺点。共轴双桨为飞行器提供上升时部分升力,亦可反向旋转提供下降压力,用于改变飞行的高度和升降控制。通过改变不同方位的四旋翼转速,可以及时调整飞行器的飞行方向,并为飞行器提供前飞动力,提高抗风性能。该飞行器不仅适用于航空物探领域,而且还能够航拍观察、农林作业、物质运输及抗震救灾等方面,具有重载、高效、稳定、安全、方便、低廉等优点。
一种多轴飞行器与人造扑翅飞行动物的搭载结构
成熟度:通过小试
技术类型:实用新型
应用行业:制造业
技术简介
本实用新型公开一种多轴飞行器与人造扑翅飞行动物的搭载结构,专利号201520556816.2。 研发目的:儿童成人玩具,机场、养鱼场、种子场驱鸟,牧场赶羊、赶牛等。 技术基本原理: 人造扑翅飞行动物,仿音、形及飞行动作,借助多轴无人飞行器,完成扑翅飞行动物运动动作,对鸟、羊、牛等产生威摄作用,达到实用经济目的。 一种多轴飞行器与人造扑翅飞行动物的搭载结构,包括安装于多轴飞行器下端的人造扑翅飞行动物,所述人造扑翅飞行动物包括一动物壳体,所述动物壳体内安装一曲柄揺杆机构;所述曲柄摇杆机构包括一曲柄,曲柄的上端贯穿开设一电机回转中心,所述电机回转中心内安装一微电机,位于曲柄的后端安装一悬挂架,所述微电机的后端设置一固定块,所述曲柄的下端开设一曲柄轴回转中心,所述曲柄轴回转中心内安装两连杆,连杆的上下端均开设一销轴孔。人造飞行动物用悬挂架固定在无人飞行器下方,飞行动物前进、上下、左右、悬停等由多轴飞行器操控,但地面观看效果犹如飞行动物扑翅飞行,如果应用到驱鸟和赶羊等,会产生很大的威摄作用。 预期效益:投资可大可小,50万-300万,一种多轴飞行器与人造扑翅飞行动物的搭载结构主要用于场地、模具、机电配件、无人飞行器购买,可从玩具开始,然后才做飞行搭载,由小到大,市场前景是看得见的,效益是会很不错的。最初投资300万,产生1000万的效益是可以期待的,后续会更好,市场会更大。
找到21项技术成果数据。
找技术 >一种动力与控制相分离的高机动多功能无人飞行器
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
本实用新型公开了一种动力与控制相分离的高机动多功能无人飞行器,机身本体中部两侧对称安装有涡喷发动机,所述机身本体前部和后部两侧均对称安装有固定机翼,四个固定机翼的中部均安装有涵道风扇,四个涵道风扇上分别安装有圆形挡板,圆形挡板通过支撑杆连接有涡轮,涡轮通过涡杆连接有电动机的传动结构,四个涵道风扇上均安装有涵道风扇电机,机身本体中部内安装有蓄电池,蓄电池通过电源线与涵道风扇电机相连。本实用新型中蓄电池只用于给四个涵道风扇驱动电机供电,带动四个涵道风扇实现倾转,进而控制飞行器的姿态,不仅可以增加飞行器的航行时间,还可以减少用电量,进而减少电池的重量,减轻飞行器的重量,增加飞行器的承载能力。
无人飞行器快递燃料悬停加注技术和装置及实施方法
成熟度:正在研发
技术类型:发明
应用行业:制造业,交通运输、仓储和邮政业,电力、热力、燃气及水生产和供应业
技术简介
该发明目前授权未登记,截止时间,2018年8月14日 无人飞行器快递燃料悬停加注技术和装置及实施方法包括无人飞行器、燃料输送装置组件和智能加注枪,充分利用现代网络、人工智能和无人飞行器技术,解决道路交通工具随时随地补充加注燃料的需求,车主通过无线网络向运营平台发出燃料补充加注交易订单,无人飞行器按运营平台系统控制中心指令通过空中快递,悬垂加注,不受时间、地点限制,飞行直达、快捷高效、安全智能、无障碍地提供补充加注燃料的服务。
一种用于捕捉低空小型无人飞行器的便携式装置及其捕捉方法
成熟度:正在研发
技术类型:发明
应用行业:租赁和商务服务业
技术简介
摘要:本发明公开了用于捕捉低空小型无人飞行器的便携式装置及其捕捉方法,该装置包括发射机构和捕捉机构,其中发射机构包括气活塞、压气气缸、单向阀、手柄、气缸、启动阀、填弹阀门、触发扳机、发射管、膛线和瞄准机构;捕捉机构包括分体弹头和扑捉网。捕捉机构由气压推动高速发射后,利用自旋离心力,分体弹头将扑捉网张开,网面与发射路线垂直,捕捉有效面积最大,扑捉网接触到小型无人飞行后,会有效干扰螺旋桨工作,使其迫降。本装置便于携带,可在移动过程中使用,易于紧急事件处理,而且成本低,没有燃料或爆炸物质,使用安全。
一种羽翼变形仿生无人飞行器及变形控制方法
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
一种羽翼变形仿生无人飞行器及变形控制方法,该飞行器由螺旋桨、翼身融合翼段、伸缩翼段、折叠羽翼控制段、仿生羽翼和稳定尾翼段6大功能部件构成;通过伸缩翼段的伸缩和仿生羽翼的折叠两种基本变形仿生组合来模拟鸟儿翱翔时的气动构型,从而实现羽翼变形仿生无人机在城市、丛林、山地等复杂地形和狭小空间随机乱流低空超低空环境中机动灵活稳定飞行;为了克服传统固定翼或多旋翼无人机难以在复杂近地乱流环境中快速灵活稳定机动穿梭的困难。
一种油电混合无人飞行器供电系统测试平台及其测试方法
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
一种油电混合无人飞行器供电系统测试平台及其测试方法,油电混合无人飞行器供电系统测试平台包括发动机发电装置(1)、旋翼电机特性测试台(2)、信号调理装置(3)、用于调整电机转速的电子调速器(4)、用于信号采集的信号采集卡(5)以及上位机(6),所述发动机发电装置(1)包括发动机(7)、发电机(8)、转速传感器(9)和扭矩传感器(10),所述旋翼电机特性测试台(2)设有无人飞行器的旋翼(11)、电机(12)、力传感器(13)、速度传感器(14)和反扭矩传感器(15)。本发明提供了一种油电混合无人飞行器供电系统测试平台及测试方法,具有开发时间短,成本低等特点。
负载平台及设有该负载平台的无人飞行器
成熟度:-
技术类型:-
应用行业:制造业
技术简介
本发明公开了一种负载平台,包括支撑脚架、围框及底架,支撑脚架包括第一支撑脚架及相对第一支撑脚架设置的第二支撑脚架,第一支撑脚架与第二支撑脚架均包括降落部及设置于该降落部两端的支撑部; 围框包括第一连接件、第一横杆及第二横杆,第一连接件分别安装于第一支撑脚架的支撑部及第二支撑脚架的支撑部,第一横杆两端及第二横杆两端分别连接于第一连接件; 底架包括第二连接件及第三横杆,第二连接件分别安装于第一支撑脚架的降落部及第二支撑脚架的降落部,第三横杆两端分别连接于第二连接件。 如此,大型物件等物品可放置于该容置空间,装卸简单,且使用方便。 此外,增加了该负载平台的刚度及抗振性能。
低空无人飞行器航测遥感系统
成熟度:-
技术类型:-
应用行业:信息传输、软件和信息技术服务业
技术简介
内容简介:1.任务来源:(1)国土资源部重点科技项目《UAVRS-II型低空无人机遥感监测系统的研制》,项目号991017,项目起止时间1999年12月至2003年8月,项目经费200万元。项目验收时间2003年8月。(2)北京测科空间信息技术有限公司自筹经费40万元,研究开发应急测绘专用特轻型无人机系统和无人机载双相机低空航测系统,2008年。2.应用领域和技术原理(1)地政、矿政管理日常巡查监测需要高分辨率影像,而现今卫星遥感与有人驾驶飞机的普通航空摄影,经常受阻于阴云天气,达不到及时服务的要求;(2)大比例尺(1/2000、1/1000、1/500)地形图测绘,需要高分辨率、高清晰度的航空影像,而这种任务经常是呈小面积、星罗棋布的,普通航空摄影面对这类任务需求,显得效率太低;(3)防灾救灾和突发事件处置,需要应急测绘技术支持,这种应急测绘能力最好是全国分布式布局的,能在需要的时候,12小时内到达任务地点,24小时内提供应急测绘成果。该项目通过无人飞行器低空航测系统能获取低空、高分辨率、高清晰度影像的技术原理,解决上述应用难题。3.性能指标:无人飞行器低空航测系统(UAV-MAP)由无人飞行器飞行平台、特宽角组合相机、现代航测软件三个基本部分,加地面运载车、通信监测等辅助设备组成。它有三大技术特点:(1)无人飞行器飞得很低,低到离地面100米安全飞行;可以飞得很慢,以每小时30~100公里的速度航摄作业。因此可以获取到比其他有人驾驶飞行器都更清晰的航空影像,以高分辨率、高清晰度影像实现高精度摄影测量。(2)UAV专用宽角组合相机,具有自检校功能,能自动消除机械变形的影响,并且以视场角补偿的形式替代稳定平台,从而实现成像系统的轻小型化。(3)现代航测自动空三软件MAP-AT,突破传统航测在摄影比例尺、姿态角、重叠度等方面的限制,能够处理现有胶片相机、数码相机、组合宽角相机,通过普通飞机航摄、低空轻型机航摄、无人机航摄、无人飞艇航摄所获取的竖直摄影影像、交向摄影影像、倾斜影像以及复杂航线多基线摄影影像;通过多视影像匹配自动构建空中三角测量网,能进行多达10000片影像的大区域光束平差;配合低空遥感的高分辨率影像,实现高精度航测定位;能自动化生产数字高程模型(DEM)和数字正射影像(DOM)等产品。现代航测、影像测图及全野外采集数据制图和数据建库软件MAP-CS、MAP-CS的编图模块已升级到国标2008符号库。该系统的成功应用案例有:(1)大比例尺测图—采用无人飞艇、无人飞机航测系统获取乳山市470平方公里高分辨率影像,生产1:1000正射影像和1:1000地形图。(2)城市变化监测—用MAP-AT软件处理某城区两个年度的影像,以三维DSM方法自动发现超过2米的房屋拆建变化情况。(3)应急测绘—在24小时内完成广州市某城区从飞行到正射影像成果的全部内、外业工作。该系统技术具有下列推广应用前景:(1)防灾救灾与应急测绘;(2)新农村与小城镇建设;(3)地政与矿政日常巡查监测;(4)城市精细化管理与三维规划;(5)影像地籍;(6)线路工程测量。4.与国内外同类技术比较(1)该成果中无人机低空航测系统所采用双相机传感器系统,较国内外市场上的单相机无人机系统来说,航摄效率更高,产品的高程精度更高。(2)自主研发的特宽角组合相机,较之国内外先进产品,重量轻5~8倍,是唯一一款能在轻于20公斤荷载无人飞行器上使用的低空特宽角相机。(3)MAP-AT软件空中三角测量功能可与世界先进的软件相当,而且增添了大量适用于UAV影像的功能。5.成果的创新性(1)发明了具有自检校功能的特宽角组合相机,从而可以采用轻型材料结构,使相机重量大幅度减轻,并且采用了边缘视场补偿偏斜的技术,省去了三轴云台。(2)在国内首次利用无人飞艇、无人飞机低飞、低速的良好性能,获取高清晰度、高分辨率影像,达到1:1000测图规范标准。(3)利用MAP-AT功能实现城市建筑物变化的三维全自动化监测。(4)达到24小时完成内、外业全过程,提供正射影像产品的能力。6.作用意义(1)完成深圳大运、坪山、光明、龙华四个新城区总面积424Km'2的高分辨率影像获取任务,完成1:1000正射影像图制作,创收80万元。(2)此系统安全性好、易于操作,可推广到省、市级测绘队伍。7.推广应用范围防灾救灾与应急测绘;新农村与小城镇建设;地政与矿政日常巡查监测;城市精细管理和三维规划;影像地籍;线路工程测量。
一种应用于火灾现场情况勘测的耐高温自主无人飞行器系统
成熟度:正在研发
技术类型:实用新型
应用行业:租赁和商务服务业
技术简介
本实用新型公开了用于火灾现场情况勘测的耐高温自主无人飞行器系统。 耐高温自主无人飞行器系统包括外置主控制器(17)和飞行器模型(13);所述飞行器模型(13),包括机身(4)和云台支架(8),所述机身(4)上设置有呈十字分布的四个机翼(1),每个机翼(1)与无刷电机(2)相连,继而无刷电机(2)通过无刷电调(3)与机身(4)相连;机身(4)上方设置有飞行控制板(5)和飞行控制板安装棱柱(7;机身(4)下方设置有执行部件(10)和执行部件固定柱(9),执行部件(10)外部设置有耐高温隔热罩(11)。耐高温自主无人飞行器系统能够在未知的环境中自主飞行,稳定、安全、灵活的搜救被困群众。
一种具有旋翼和气囊复合动力无人飞行器
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
摘要:本实用新型公开了一种具有旋翼和气囊复合动力无人飞行器,是为解决无人机有效载荷小、续航时间较短、抗干扰能力弱等问题和航空物探技术在航空设备和飞行员上的不足而设计的。它主要包括气囊、四个旋翼机构、共轴双桨机构和吊舱。气囊为无人机提供主要升力、克服无人机有效载荷小的缺点。共轴双桨为飞行器提供上升时部分升力,亦可反向旋转提供下降压力,用于改变飞行的高度和升降控制。通过改变不同方位的四旋翼转速,可以及时调整飞行器的飞行方向,并为飞行器提供前飞动力,提高抗风性能。该飞行器不仅适用于航空物探领域,而且还能够航拍观察、农林作业、物质运输及抗震救灾等方面,具有重载、高效、稳定、安全、方便、低廉等优点。
一种多轴飞行器与人造扑翅飞行动物的搭载结构
成熟度:通过小试
技术类型:实用新型
应用行业:制造业
技术简介
本实用新型公开一种多轴飞行器与人造扑翅飞行动物的搭载结构,专利号201520556816.2。 研发目的:儿童成人玩具,机场、养鱼场、种子场驱鸟,牧场赶羊、赶牛等。 技术基本原理: 人造扑翅飞行动物,仿音、形及飞行动作,借助多轴无人飞行器,完成扑翅飞行动物运动动作,对鸟、羊、牛等产生威摄作用,达到实用经济目的。 一种多轴飞行器与人造扑翅飞行动物的搭载结构,包括安装于多轴飞行器下端的人造扑翅飞行动物,所述人造扑翅飞行动物包括一动物壳体,所述动物壳体内安装一曲柄揺杆机构;所述曲柄摇杆机构包括一曲柄,曲柄的上端贯穿开设一电机回转中心,所述电机回转中心内安装一微电机,位于曲柄的后端安装一悬挂架,所述微电机的后端设置一固定块,所述曲柄的下端开设一曲柄轴回转中心,所述曲柄轴回转中心内安装两连杆,连杆的上下端均开设一销轴孔。人造飞行动物用悬挂架固定在无人飞行器下方,飞行动物前进、上下、左右、悬停等由多轴飞行器操控,但地面观看效果犹如飞行动物扑翅飞行,如果应用到驱鸟和赶羊等,会产生很大的威摄作用。 预期效益:投资可大可小,50万-300万,一种多轴飞行器与人造扑翅飞行动物的搭载结构主要用于场地、模具、机电配件、无人飞行器购买,可从玩具开始,然后才做飞行搭载,由小到大,市场前景是看得见的,效益是会很不错的。最初投资300万,产生1000万的效益是可以期待的,后续会更好,市场会更大。
找到21项技术成果数据。
找技术 >一种动力与控制相分离的高机动多功能无人飞行器
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
本实用新型公开了一种动力与控制相分离的高机动多功能无人飞行器,机身本体中部两侧对称安装有涡喷发动机,所述机身本体前部和后部两侧均对称安装有固定机翼,四个固定机翼的中部均安装有涵道风扇,四个涵道风扇上分别安装有圆形挡板,圆形挡板通过支撑杆连接有涡轮,涡轮通过涡杆连接有电动机的传动结构,四个涵道风扇上均安装有涵道风扇电机,机身本体中部内安装有蓄电池,蓄电池通过电源线与涵道风扇电机相连。本实用新型中蓄电池只用于给四个涵道风扇驱动电机供电,带动四个涵道风扇实现倾转,进而控制飞行器的姿态,不仅可以增加飞行器的航行时间,还可以减少用电量,进而减少电池的重量,减轻飞行器的重量,增加飞行器的承载能力。
无人飞行器快递燃料悬停加注技术和装置及实施方法
成熟度:正在研发
技术类型:发明
应用行业:制造业,交通运输、仓储和邮政业,电力、热力、燃气及水生产和供应业
技术简介
该发明目前授权未登记,截止时间,2018年8月14日 无人飞行器快递燃料悬停加注技术和装置及实施方法包括无人飞行器、燃料输送装置组件和智能加注枪,充分利用现代网络、人工智能和无人飞行器技术,解决道路交通工具随时随地补充加注燃料的需求,车主通过无线网络向运营平台发出燃料补充加注交易订单,无人飞行器按运营平台系统控制中心指令通过空中快递,悬垂加注,不受时间、地点限制,飞行直达、快捷高效、安全智能、无障碍地提供补充加注燃料的服务。
一种用于捕捉低空小型无人飞行器的便携式装置及其捕捉方法
成熟度:正在研发
技术类型:发明
应用行业:租赁和商务服务业
技术简介
摘要:本发明公开了用于捕捉低空小型无人飞行器的便携式装置及其捕捉方法,该装置包括发射机构和捕捉机构,其中发射机构包括气活塞、压气气缸、单向阀、手柄、气缸、启动阀、填弹阀门、触发扳机、发射管、膛线和瞄准机构;捕捉机构包括分体弹头和扑捉网。捕捉机构由气压推动高速发射后,利用自旋离心力,分体弹头将扑捉网张开,网面与发射路线垂直,捕捉有效面积最大,扑捉网接触到小型无人飞行后,会有效干扰螺旋桨工作,使其迫降。本装置便于携带,可在移动过程中使用,易于紧急事件处理,而且成本低,没有燃料或爆炸物质,使用安全。
一种羽翼变形仿生无人飞行器及变形控制方法
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
一种羽翼变形仿生无人飞行器及变形控制方法,该飞行器由螺旋桨、翼身融合翼段、伸缩翼段、折叠羽翼控制段、仿生羽翼和稳定尾翼段6大功能部件构成;通过伸缩翼段的伸缩和仿生羽翼的折叠两种基本变形仿生组合来模拟鸟儿翱翔时的气动构型,从而实现羽翼变形仿生无人机在城市、丛林、山地等复杂地形和狭小空间随机乱流低空超低空环境中机动灵活稳定飞行;为了克服传统固定翼或多旋翼无人机难以在复杂近地乱流环境中快速灵活稳定机动穿梭的困难。
一种油电混合无人飞行器供电系统测试平台及其测试方法
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
一种油电混合无人飞行器供电系统测试平台及其测试方法,油电混合无人飞行器供电系统测试平台包括发动机发电装置(1)、旋翼电机特性测试台(2)、信号调理装置(3)、用于调整电机转速的电子调速器(4)、用于信号采集的信号采集卡(5)以及上位机(6),所述发动机发电装置(1)包括发动机(7)、发电机(8)、转速传感器(9)和扭矩传感器(10),所述旋翼电机特性测试台(2)设有无人飞行器的旋翼(11)、电机(12)、力传感器(13)、速度传感器(14)和反扭矩传感器(15)。本发明提供了一种油电混合无人飞行器供电系统测试平台及测试方法,具有开发时间短,成本低等特点。
负载平台及设有该负载平台的无人飞行器
成熟度:-
技术类型:-
应用行业:制造业
技术简介
本发明公开了一种负载平台,包括支撑脚架、围框及底架,支撑脚架包括第一支撑脚架及相对第一支撑脚架设置的第二支撑脚架,第一支撑脚架与第二支撑脚架均包括降落部及设置于该降落部两端的支撑部; 围框包括第一连接件、第一横杆及第二横杆,第一连接件分别安装于第一支撑脚架的支撑部及第二支撑脚架的支撑部,第一横杆两端及第二横杆两端分别连接于第一连接件; 底架包括第二连接件及第三横杆,第二连接件分别安装于第一支撑脚架的降落部及第二支撑脚架的降落部,第三横杆两端分别连接于第二连接件。 如此,大型物件等物品可放置于该容置空间,装卸简单,且使用方便。 此外,增加了该负载平台的刚度及抗振性能。
低空无人飞行器航测遥感系统
成熟度:-
技术类型:-
应用行业:信息传输、软件和信息技术服务业
技术简介
内容简介:1.任务来源:(1)国土资源部重点科技项目《UAVRS-II型低空无人机遥感监测系统的研制》,项目号991017,项目起止时间1999年12月至2003年8月,项目经费200万元。项目验收时间2003年8月。(2)北京测科空间信息技术有限公司自筹经费40万元,研究开发应急测绘专用特轻型无人机系统和无人机载双相机低空航测系统,2008年。2.应用领域和技术原理(1)地政、矿政管理日常巡查监测需要高分辨率影像,而现今卫星遥感与有人驾驶飞机的普通航空摄影,经常受阻于阴云天气,达不到及时服务的要求;(2)大比例尺(1/2000、1/1000、1/500)地形图测绘,需要高分辨率、高清晰度的航空影像,而这种任务经常是呈小面积、星罗棋布的,普通航空摄影面对这类任务需求,显得效率太低;(3)防灾救灾和突发事件处置,需要应急测绘技术支持,这种应急测绘能力最好是全国分布式布局的,能在需要的时候,12小时内到达任务地点,24小时内提供应急测绘成果。该项目通过无人飞行器低空航测系统能获取低空、高分辨率、高清晰度影像的技术原理,解决上述应用难题。3.性能指标:无人飞行器低空航测系统(UAV-MAP)由无人飞行器飞行平台、特宽角组合相机、现代航测软件三个基本部分,加地面运载车、通信监测等辅助设备组成。它有三大技术特点:(1)无人飞行器飞得很低,低到离地面100米安全飞行;可以飞得很慢,以每小时30~100公里的速度航摄作业。因此可以获取到比其他有人驾驶飞行器都更清晰的航空影像,以高分辨率、高清晰度影像实现高精度摄影测量。(2)UAV专用宽角组合相机,具有自检校功能,能自动消除机械变形的影响,并且以视场角补偿的形式替代稳定平台,从而实现成像系统的轻小型化。(3)现代航测自动空三软件MAP-AT,突破传统航测在摄影比例尺、姿态角、重叠度等方面的限制,能够处理现有胶片相机、数码相机、组合宽角相机,通过普通飞机航摄、低空轻型机航摄、无人机航摄、无人飞艇航摄所获取的竖直摄影影像、交向摄影影像、倾斜影像以及复杂航线多基线摄影影像;通过多视影像匹配自动构建空中三角测量网,能进行多达10000片影像的大区域光束平差;配合低空遥感的高分辨率影像,实现高精度航测定位;能自动化生产数字高程模型(DEM)和数字正射影像(DOM)等产品。现代航测、影像测图及全野外采集数据制图和数据建库软件MAP-CS、MAP-CS的编图模块已升级到国标2008符号库。该系统的成功应用案例有:(1)大比例尺测图—采用无人飞艇、无人飞机航测系统获取乳山市470平方公里高分辨率影像,生产1:1000正射影像和1:1000地形图。(2)城市变化监测—用MAP-AT软件处理某城区两个年度的影像,以三维DSM方法自动发现超过2米的房屋拆建变化情况。(3)应急测绘—在24小时内完成广州市某城区从飞行到正射影像成果的全部内、外业工作。该系统技术具有下列推广应用前景:(1)防灾救灾与应急测绘;(2)新农村与小城镇建设;(3)地政与矿政日常巡查监测;(4)城市精细化管理与三维规划;(5)影像地籍;(6)线路工程测量。4.与国内外同类技术比较(1)该成果中无人机低空航测系统所采用双相机传感器系统,较国内外市场上的单相机无人机系统来说,航摄效率更高,产品的高程精度更高。(2)自主研发的特宽角组合相机,较之国内外先进产品,重量轻5~8倍,是唯一一款能在轻于20公斤荷载无人飞行器上使用的低空特宽角相机。(3)MAP-AT软件空中三角测量功能可与世界先进的软件相当,而且增添了大量适用于UAV影像的功能。5.成果的创新性(1)发明了具有自检校功能的特宽角组合相机,从而可以采用轻型材料结构,使相机重量大幅度减轻,并且采用了边缘视场补偿偏斜的技术,省去了三轴云台。(2)在国内首次利用无人飞艇、无人飞机低飞、低速的良好性能,获取高清晰度、高分辨率影像,达到1:1000测图规范标准。(3)利用MAP-AT功能实现城市建筑物变化的三维全自动化监测。(4)达到24小时完成内、外业全过程,提供正射影像产品的能力。6.作用意义(1)完成深圳大运、坪山、光明、龙华四个新城区总面积424Km'2的高分辨率影像获取任务,完成1:1000正射影像图制作,创收80万元。(2)此系统安全性好、易于操作,可推广到省、市级测绘队伍。7.推广应用范围防灾救灾与应急测绘;新农村与小城镇建设;地政与矿政日常巡查监测;城市精细管理和三维规划;影像地籍;线路工程测量。
一种应用于火灾现场情况勘测的耐高温自主无人飞行器系统
成熟度:正在研发
技术类型:实用新型
应用行业:租赁和商务服务业
技术简介
本实用新型公开了用于火灾现场情况勘测的耐高温自主无人飞行器系统。 耐高温自主无人飞行器系统包括外置主控制器(17)和飞行器模型(13);所述飞行器模型(13),包括机身(4)和云台支架(8),所述机身(4)上设置有呈十字分布的四个机翼(1),每个机翼(1)与无刷电机(2)相连,继而无刷电机(2)通过无刷电调(3)与机身(4)相连;机身(4)上方设置有飞行控制板(5)和飞行控制板安装棱柱(7;机身(4)下方设置有执行部件(10)和执行部件固定柱(9),执行部件(10)外部设置有耐高温隔热罩(11)。耐高温自主无人飞行器系统能够在未知的环境中自主飞行,稳定、安全、灵活的搜救被困群众。
一种具有旋翼和气囊复合动力无人飞行器
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
摘要:本实用新型公开了一种具有旋翼和气囊复合动力无人飞行器,是为解决无人机有效载荷小、续航时间较短、抗干扰能力弱等问题和航空物探技术在航空设备和飞行员上的不足而设计的。它主要包括气囊、四个旋翼机构、共轴双桨机构和吊舱。气囊为无人机提供主要升力、克服无人机有效载荷小的缺点。共轴双桨为飞行器提供上升时部分升力,亦可反向旋转提供下降压力,用于改变飞行的高度和升降控制。通过改变不同方位的四旋翼转速,可以及时调整飞行器的飞行方向,并为飞行器提供前飞动力,提高抗风性能。该飞行器不仅适用于航空物探领域,而且还能够航拍观察、农林作业、物质运输及抗震救灾等方面,具有重载、高效、稳定、安全、方便、低廉等优点。
一种多轴飞行器与人造扑翅飞行动物的搭载结构
成熟度:通过小试
技术类型:实用新型
应用行业:制造业
技术简介
本实用新型公开一种多轴飞行器与人造扑翅飞行动物的搭载结构,专利号201520556816.2。 研发目的:儿童成人玩具,机场、养鱼场、种子场驱鸟,牧场赶羊、赶牛等。 技术基本原理: 人造扑翅飞行动物,仿音、形及飞行动作,借助多轴无人飞行器,完成扑翅飞行动物运动动作,对鸟、羊、牛等产生威摄作用,达到实用经济目的。 一种多轴飞行器与人造扑翅飞行动物的搭载结构,包括安装于多轴飞行器下端的人造扑翅飞行动物,所述人造扑翅飞行动物包括一动物壳体,所述动物壳体内安装一曲柄揺杆机构;所述曲柄摇杆机构包括一曲柄,曲柄的上端贯穿开设一电机回转中心,所述电机回转中心内安装一微电机,位于曲柄的后端安装一悬挂架,所述微电机的后端设置一固定块,所述曲柄的下端开设一曲柄轴回转中心,所述曲柄轴回转中心内安装两连杆,连杆的上下端均开设一销轴孔。人造飞行动物用悬挂架固定在无人飞行器下方,飞行动物前进、上下、左右、悬停等由多轴飞行器操控,但地面观看效果犹如飞行动物扑翅飞行,如果应用到驱鸟和赶羊等,会产生很大的威摄作用。 预期效益:投资可大可小,50万-300万,一种多轴飞行器与人造扑翅飞行动物的搭载结构主要用于场地、模具、机电配件、无人飞行器购买,可从玩具开始,然后才做飞行搭载,由小到大,市场前景是看得见的,效益是会很不错的。最初投资300万,产生1000万的效益是可以期待的,后续会更好,市场会更大。
找到21项技术成果数据。
找技术 >一种动力与控制相分离的高机动多功能无人飞行器
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
本实用新型公开了一种动力与控制相分离的高机动多功能无人飞行器,机身本体中部两侧对称安装有涡喷发动机,所述机身本体前部和后部两侧均对称安装有固定机翼,四个固定机翼的中部均安装有涵道风扇,四个涵道风扇上分别安装有圆形挡板,圆形挡板通过支撑杆连接有涡轮,涡轮通过涡杆连接有电动机的传动结构,四个涵道风扇上均安装有涵道风扇电机,机身本体中部内安装有蓄电池,蓄电池通过电源线与涵道风扇电机相连。本实用新型中蓄电池只用于给四个涵道风扇驱动电机供电,带动四个涵道风扇实现倾转,进而控制飞行器的姿态,不仅可以增加飞行器的航行时间,还可以减少用电量,进而减少电池的重量,减轻飞行器的重量,增加飞行器的承载能力。
无人飞行器快递燃料悬停加注技术和装置及实施方法
成熟度:正在研发
技术类型:发明
应用行业:制造业,交通运输、仓储和邮政业,电力、热力、燃气及水生产和供应业
技术简介
该发明目前授权未登记,截止时间,2018年8月14日 无人飞行器快递燃料悬停加注技术和装置及实施方法包括无人飞行器、燃料输送装置组件和智能加注枪,充分利用现代网络、人工智能和无人飞行器技术,解决道路交通工具随时随地补充加注燃料的需求,车主通过无线网络向运营平台发出燃料补充加注交易订单,无人飞行器按运营平台系统控制中心指令通过空中快递,悬垂加注,不受时间、地点限制,飞行直达、快捷高效、安全智能、无障碍地提供补充加注燃料的服务。
一种用于捕捉低空小型无人飞行器的便携式装置及其捕捉方法
成熟度:正在研发
技术类型:发明
应用行业:租赁和商务服务业
技术简介
摘要:本发明公开了用于捕捉低空小型无人飞行器的便携式装置及其捕捉方法,该装置包括发射机构和捕捉机构,其中发射机构包括气活塞、压气气缸、单向阀、手柄、气缸、启动阀、填弹阀门、触发扳机、发射管、膛线和瞄准机构;捕捉机构包括分体弹头和扑捉网。捕捉机构由气压推动高速发射后,利用自旋离心力,分体弹头将扑捉网张开,网面与发射路线垂直,捕捉有效面积最大,扑捉网接触到小型无人飞行后,会有效干扰螺旋桨工作,使其迫降。本装置便于携带,可在移动过程中使用,易于紧急事件处理,而且成本低,没有燃料或爆炸物质,使用安全。
一种羽翼变形仿生无人飞行器及变形控制方法
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
一种羽翼变形仿生无人飞行器及变形控制方法,该飞行器由螺旋桨、翼身融合翼段、伸缩翼段、折叠羽翼控制段、仿生羽翼和稳定尾翼段6大功能部件构成;通过伸缩翼段的伸缩和仿生羽翼的折叠两种基本变形仿生组合来模拟鸟儿翱翔时的气动构型,从而实现羽翼变形仿生无人机在城市、丛林、山地等复杂地形和狭小空间随机乱流低空超低空环境中机动灵活稳定飞行;为了克服传统固定翼或多旋翼无人机难以在复杂近地乱流环境中快速灵活稳定机动穿梭的困难。
一种油电混合无人飞行器供电系统测试平台及其测试方法
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
一种油电混合无人飞行器供电系统测试平台及其测试方法,油电混合无人飞行器供电系统测试平台包括发动机发电装置(1)、旋翼电机特性测试台(2)、信号调理装置(3)、用于调整电机转速的电子调速器(4)、用于信号采集的信号采集卡(5)以及上位机(6),所述发动机发电装置(1)包括发动机(7)、发电机(8)、转速传感器(9)和扭矩传感器(10),所述旋翼电机特性测试台(2)设有无人飞行器的旋翼(11)、电机(12)、力传感器(13)、速度传感器(14)和反扭矩传感器(15)。本发明提供了一种油电混合无人飞行器供电系统测试平台及测试方法,具有开发时间短,成本低等特点。
负载平台及设有该负载平台的无人飞行器
成熟度:-
技术类型:-
应用行业:制造业
技术简介
本发明公开了一种负载平台,包括支撑脚架、围框及底架,支撑脚架包括第一支撑脚架及相对第一支撑脚架设置的第二支撑脚架,第一支撑脚架与第二支撑脚架均包括降落部及设置于该降落部两端的支撑部; 围框包括第一连接件、第一横杆及第二横杆,第一连接件分别安装于第一支撑脚架的支撑部及第二支撑脚架的支撑部,第一横杆两端及第二横杆两端分别连接于第一连接件; 底架包括第二连接件及第三横杆,第二连接件分别安装于第一支撑脚架的降落部及第二支撑脚架的降落部,第三横杆两端分别连接于第二连接件。 如此,大型物件等物品可放置于该容置空间,装卸简单,且使用方便。 此外,增加了该负载平台的刚度及抗振性能。
低空无人飞行器航测遥感系统
成熟度:-
技术类型:-
应用行业:信息传输、软件和信息技术服务业
技术简介
内容简介:1.任务来源:(1)国土资源部重点科技项目《UAVRS-II型低空无人机遥感监测系统的研制》,项目号991017,项目起止时间1999年12月至2003年8月,项目经费200万元。项目验收时间2003年8月。(2)北京测科空间信息技术有限公司自筹经费40万元,研究开发应急测绘专用特轻型无人机系统和无人机载双相机低空航测系统,2008年。2.应用领域和技术原理(1)地政、矿政管理日常巡查监测需要高分辨率影像,而现今卫星遥感与有人驾驶飞机的普通航空摄影,经常受阻于阴云天气,达不到及时服务的要求;(2)大比例尺(1/2000、1/1000、1/500)地形图测绘,需要高分辨率、高清晰度的航空影像,而这种任务经常是呈小面积、星罗棋布的,普通航空摄影面对这类任务需求,显得效率太低;(3)防灾救灾和突发事件处置,需要应急测绘技术支持,这种应急测绘能力最好是全国分布式布局的,能在需要的时候,12小时内到达任务地点,24小时内提供应急测绘成果。该项目通过无人飞行器低空航测系统能获取低空、高分辨率、高清晰度影像的技术原理,解决上述应用难题。3.性能指标:无人飞行器低空航测系统(UAV-MAP)由无人飞行器飞行平台、特宽角组合相机、现代航测软件三个基本部分,加地面运载车、通信监测等辅助设备组成。它有三大技术特点:(1)无人飞行器飞得很低,低到离地面100米安全飞行;可以飞得很慢,以每小时30~100公里的速度航摄作业。因此可以获取到比其他有人驾驶飞行器都更清晰的航空影像,以高分辨率、高清晰度影像实现高精度摄影测量。(2)UAV专用宽角组合相机,具有自检校功能,能自动消除机械变形的影响,并且以视场角补偿的形式替代稳定平台,从而实现成像系统的轻小型化。(3)现代航测自动空三软件MAP-AT,突破传统航测在摄影比例尺、姿态角、重叠度等方面的限制,能够处理现有胶片相机、数码相机、组合宽角相机,通过普通飞机航摄、低空轻型机航摄、无人机航摄、无人飞艇航摄所获取的竖直摄影影像、交向摄影影像、倾斜影像以及复杂航线多基线摄影影像;通过多视影像匹配自动构建空中三角测量网,能进行多达10000片影像的大区域光束平差;配合低空遥感的高分辨率影像,实现高精度航测定位;能自动化生产数字高程模型(DEM)和数字正射影像(DOM)等产品。现代航测、影像测图及全野外采集数据制图和数据建库软件MAP-CS、MAP-CS的编图模块已升级到国标2008符号库。该系统的成功应用案例有:(1)大比例尺测图—采用无人飞艇、无人飞机航测系统获取乳山市470平方公里高分辨率影像,生产1:1000正射影像和1:1000地形图。(2)城市变化监测—用MAP-AT软件处理某城区两个年度的影像,以三维DSM方法自动发现超过2米的房屋拆建变化情况。(3)应急测绘—在24小时内完成广州市某城区从飞行到正射影像成果的全部内、外业工作。该系统技术具有下列推广应用前景:(1)防灾救灾与应急测绘;(2)新农村与小城镇建设;(3)地政与矿政日常巡查监测;(4)城市精细化管理与三维规划;(5)影像地籍;(6)线路工程测量。4.与国内外同类技术比较(1)该成果中无人机低空航测系统所采用双相机传感器系统,较国内外市场上的单相机无人机系统来说,航摄效率更高,产品的高程精度更高。(2)自主研发的特宽角组合相机,较之国内外先进产品,重量轻5~8倍,是唯一一款能在轻于20公斤荷载无人飞行器上使用的低空特宽角相机。(3)MAP-AT软件空中三角测量功能可与世界先进的软件相当,而且增添了大量适用于UAV影像的功能。5.成果的创新性(1)发明了具有自检校功能的特宽角组合相机,从而可以采用轻型材料结构,使相机重量大幅度减轻,并且采用了边缘视场补偿偏斜的技术,省去了三轴云台。(2)在国内首次利用无人飞艇、无人飞机低飞、低速的良好性能,获取高清晰度、高分辨率影像,达到1:1000测图规范标准。(3)利用MAP-AT功能实现城市建筑物变化的三维全自动化监测。(4)达到24小时完成内、外业全过程,提供正射影像产品的能力。6.作用意义(1)完成深圳大运、坪山、光明、龙华四个新城区总面积424Km'2的高分辨率影像获取任务,完成1:1000正射影像图制作,创收80万元。(2)此系统安全性好、易于操作,可推广到省、市级测绘队伍。7.推广应用范围防灾救灾与应急测绘;新农村与小城镇建设;地政与矿政日常巡查监测;城市精细管理和三维规划;影像地籍;线路工程测量。
一种应用于火灾现场情况勘测的耐高温自主无人飞行器系统
成熟度:正在研发
技术类型:实用新型
应用行业:租赁和商务服务业
技术简介
本实用新型公开了用于火灾现场情况勘测的耐高温自主无人飞行器系统。 耐高温自主无人飞行器系统包括外置主控制器(17)和飞行器模型(13);所述飞行器模型(13),包括机身(4)和云台支架(8),所述机身(4)上设置有呈十字分布的四个机翼(1),每个机翼(1)与无刷电机(2)相连,继而无刷电机(2)通过无刷电调(3)与机身(4)相连;机身(4)上方设置有飞行控制板(5)和飞行控制板安装棱柱(7;机身(4)下方设置有执行部件(10)和执行部件固定柱(9),执行部件(10)外部设置有耐高温隔热罩(11)。耐高温自主无人飞行器系统能够在未知的环境中自主飞行,稳定、安全、灵活的搜救被困群众。
一种具有旋翼和气囊复合动力无人飞行器
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
摘要:本实用新型公开了一种具有旋翼和气囊复合动力无人飞行器,是为解决无人机有效载荷小、续航时间较短、抗干扰能力弱等问题和航空物探技术在航空设备和飞行员上的不足而设计的。它主要包括气囊、四个旋翼机构、共轴双桨机构和吊舱。气囊为无人机提供主要升力、克服无人机有效载荷小的缺点。共轴双桨为飞行器提供上升时部分升力,亦可反向旋转提供下降压力,用于改变飞行的高度和升降控制。通过改变不同方位的四旋翼转速,可以及时调整飞行器的飞行方向,并为飞行器提供前飞动力,提高抗风性能。该飞行器不仅适用于航空物探领域,而且还能够航拍观察、农林作业、物质运输及抗震救灾等方面,具有重载、高效、稳定、安全、方便、低廉等优点。
一种多轴飞行器与人造扑翅飞行动物的搭载结构
成熟度:通过小试
技术类型:实用新型
应用行业:制造业
技术简介
本实用新型公开一种多轴飞行器与人造扑翅飞行动物的搭载结构,专利号201520556816.2。 研发目的:儿童成人玩具,机场、养鱼场、种子场驱鸟,牧场赶羊、赶牛等。 技术基本原理: 人造扑翅飞行动物,仿音、形及飞行动作,借助多轴无人飞行器,完成扑翅飞行动物运动动作,对鸟、羊、牛等产生威摄作用,达到实用经济目的。 一种多轴飞行器与人造扑翅飞行动物的搭载结构,包括安装于多轴飞行器下端的人造扑翅飞行动物,所述人造扑翅飞行动物包括一动物壳体,所述动物壳体内安装一曲柄揺杆机构;所述曲柄摇杆机构包括一曲柄,曲柄的上端贯穿开设一电机回转中心,所述电机回转中心内安装一微电机,位于曲柄的后端安装一悬挂架,所述微电机的后端设置一固定块,所述曲柄的下端开设一曲柄轴回转中心,所述曲柄轴回转中心内安装两连杆,连杆的上下端均开设一销轴孔。人造飞行动物用悬挂架固定在无人飞行器下方,飞行动物前进、上下、左右、悬停等由多轴飞行器操控,但地面观看效果犹如飞行动物扑翅飞行,如果应用到驱鸟和赶羊等,会产生很大的威摄作用。 预期效益:投资可大可小,50万-300万,一种多轴飞行器与人造扑翅飞行动物的搭载结构主要用于场地、模具、机电配件、无人飞行器购买,可从玩具开始,然后才做飞行搭载,由小到大,市场前景是看得见的,效益是会很不错的。最初投资300万,产生1000万的效益是可以期待的,后续会更好,市场会更大。
找到21项技术成果数据。
找技术 >一种动力与控制相分离的高机动多功能无人飞行器
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
本实用新型公开了一种动力与控制相分离的高机动多功能无人飞行器,机身本体中部两侧对称安装有涡喷发动机,所述机身本体前部和后部两侧均对称安装有固定机翼,四个固定机翼的中部均安装有涵道风扇,四个涵道风扇上分别安装有圆形挡板,圆形挡板通过支撑杆连接有涡轮,涡轮通过涡杆连接有电动机的传动结构,四个涵道风扇上均安装有涵道风扇电机,机身本体中部内安装有蓄电池,蓄电池通过电源线与涵道风扇电机相连。本实用新型中蓄电池只用于给四个涵道风扇驱动电机供电,带动四个涵道风扇实现倾转,进而控制飞行器的姿态,不仅可以增加飞行器的航行时间,还可以减少用电量,进而减少电池的重量,减轻飞行器的重量,增加飞行器的承载能力。
无人飞行器快递燃料悬停加注技术和装置及实施方法
成熟度:正在研发
技术类型:发明
应用行业:制造业,交通运输、仓储和邮政业,电力、热力、燃气及水生产和供应业
技术简介
该发明目前授权未登记,截止时间,2018年8月14日 无人飞行器快递燃料悬停加注技术和装置及实施方法包括无人飞行器、燃料输送装置组件和智能加注枪,充分利用现代网络、人工智能和无人飞行器技术,解决道路交通工具随时随地补充加注燃料的需求,车主通过无线网络向运营平台发出燃料补充加注交易订单,无人飞行器按运营平台系统控制中心指令通过空中快递,悬垂加注,不受时间、地点限制,飞行直达、快捷高效、安全智能、无障碍地提供补充加注燃料的服务。
一种用于捕捉低空小型无人飞行器的便携式装置及其捕捉方法
成熟度:正在研发
技术类型:发明
应用行业:租赁和商务服务业
技术简介
摘要:本发明公开了用于捕捉低空小型无人飞行器的便携式装置及其捕捉方法,该装置包括发射机构和捕捉机构,其中发射机构包括气活塞、压气气缸、单向阀、手柄、气缸、启动阀、填弹阀门、触发扳机、发射管、膛线和瞄准机构;捕捉机构包括分体弹头和扑捉网。捕捉机构由气压推动高速发射后,利用自旋离心力,分体弹头将扑捉网张开,网面与发射路线垂直,捕捉有效面积最大,扑捉网接触到小型无人飞行后,会有效干扰螺旋桨工作,使其迫降。本装置便于携带,可在移动过程中使用,易于紧急事件处理,而且成本低,没有燃料或爆炸物质,使用安全。
一种羽翼变形仿生无人飞行器及变形控制方法
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
一种羽翼变形仿生无人飞行器及变形控制方法,该飞行器由螺旋桨、翼身融合翼段、伸缩翼段、折叠羽翼控制段、仿生羽翼和稳定尾翼段6大功能部件构成;通过伸缩翼段的伸缩和仿生羽翼的折叠两种基本变形仿生组合来模拟鸟儿翱翔时的气动构型,从而实现羽翼变形仿生无人机在城市、丛林、山地等复杂地形和狭小空间随机乱流低空超低空环境中机动灵活稳定飞行;为了克服传统固定翼或多旋翼无人机难以在复杂近地乱流环境中快速灵活稳定机动穿梭的困难。
一种油电混合无人飞行器供电系统测试平台及其测试方法
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
一种油电混合无人飞行器供电系统测试平台及其测试方法,油电混合无人飞行器供电系统测试平台包括发动机发电装置(1)、旋翼电机特性测试台(2)、信号调理装置(3)、用于调整电机转速的电子调速器(4)、用于信号采集的信号采集卡(5)以及上位机(6),所述发动机发电装置(1)包括发动机(7)、发电机(8)、转速传感器(9)和扭矩传感器(10),所述旋翼电机特性测试台(2)设有无人飞行器的旋翼(11)、电机(12)、力传感器(13)、速度传感器(14)和反扭矩传感器(15)。本发明提供了一种油电混合无人飞行器供电系统测试平台及测试方法,具有开发时间短,成本低等特点。
负载平台及设有该负载平台的无人飞行器
成熟度:-
技术类型:-
应用行业:制造业
技术简介
本发明公开了一种负载平台,包括支撑脚架、围框及底架,支撑脚架包括第一支撑脚架及相对第一支撑脚架设置的第二支撑脚架,第一支撑脚架与第二支撑脚架均包括降落部及设置于该降落部两端的支撑部; 围框包括第一连接件、第一横杆及第二横杆,第一连接件分别安装于第一支撑脚架的支撑部及第二支撑脚架的支撑部,第一横杆两端及第二横杆两端分别连接于第一连接件; 底架包括第二连接件及第三横杆,第二连接件分别安装于第一支撑脚架的降落部及第二支撑脚架的降落部,第三横杆两端分别连接于第二连接件。 如此,大型物件等物品可放置于该容置空间,装卸简单,且使用方便。 此外,增加了该负载平台的刚度及抗振性能。
低空无人飞行器航测遥感系统
成熟度:-
技术类型:-
应用行业:信息传输、软件和信息技术服务业
技术简介
内容简介:1.任务来源:(1)国土资源部重点科技项目《UAVRS-II型低空无人机遥感监测系统的研制》,项目号991017,项目起止时间1999年12月至2003年8月,项目经费200万元。项目验收时间2003年8月。(2)北京测科空间信息技术有限公司自筹经费40万元,研究开发应急测绘专用特轻型无人机系统和无人机载双相机低空航测系统,2008年。2.应用领域和技术原理(1)地政、矿政管理日常巡查监测需要高分辨率影像,而现今卫星遥感与有人驾驶飞机的普通航空摄影,经常受阻于阴云天气,达不到及时服务的要求;(2)大比例尺(1/2000、1/1000、1/500)地形图测绘,需要高分辨率、高清晰度的航空影像,而这种任务经常是呈小面积、星罗棋布的,普通航空摄影面对这类任务需求,显得效率太低;(3)防灾救灾和突发事件处置,需要应急测绘技术支持,这种应急测绘能力最好是全国分布式布局的,能在需要的时候,12小时内到达任务地点,24小时内提供应急测绘成果。该项目通过无人飞行器低空航测系统能获取低空、高分辨率、高清晰度影像的技术原理,解决上述应用难题。3.性能指标:无人飞行器低空航测系统(UAV-MAP)由无人飞行器飞行平台、特宽角组合相机、现代航测软件三个基本部分,加地面运载车、通信监测等辅助设备组成。它有三大技术特点:(1)无人飞行器飞得很低,低到离地面100米安全飞行;可以飞得很慢,以每小时30~100公里的速度航摄作业。因此可以获取到比其他有人驾驶飞行器都更清晰的航空影像,以高分辨率、高清晰度影像实现高精度摄影测量。(2)UAV专用宽角组合相机,具有自检校功能,能自动消除机械变形的影响,并且以视场角补偿的形式替代稳定平台,从而实现成像系统的轻小型化。(3)现代航测自动空三软件MAP-AT,突破传统航测在摄影比例尺、姿态角、重叠度等方面的限制,能够处理现有胶片相机、数码相机、组合宽角相机,通过普通飞机航摄、低空轻型机航摄、无人机航摄、无人飞艇航摄所获取的竖直摄影影像、交向摄影影像、倾斜影像以及复杂航线多基线摄影影像;通过多视影像匹配自动构建空中三角测量网,能进行多达10000片影像的大区域光束平差;配合低空遥感的高分辨率影像,实现高精度航测定位;能自动化生产数字高程模型(DEM)和数字正射影像(DOM)等产品。现代航测、影像测图及全野外采集数据制图和数据建库软件MAP-CS、MAP-CS的编图模块已升级到国标2008符号库。该系统的成功应用案例有:(1)大比例尺测图—采用无人飞艇、无人飞机航测系统获取乳山市470平方公里高分辨率影像,生产1:1000正射影像和1:1000地形图。(2)城市变化监测—用MAP-AT软件处理某城区两个年度的影像,以三维DSM方法自动发现超过2米的房屋拆建变化情况。(3)应急测绘—在24小时内完成广州市某城区从飞行到正射影像成果的全部内、外业工作。该系统技术具有下列推广应用前景:(1)防灾救灾与应急测绘;(2)新农村与小城镇建设;(3)地政与矿政日常巡查监测;(4)城市精细化管理与三维规划;(5)影像地籍;(6)线路工程测量。4.与国内外同类技术比较(1)该成果中无人机低空航测系统所采用双相机传感器系统,较国内外市场上的单相机无人机系统来说,航摄效率更高,产品的高程精度更高。(2)自主研发的特宽角组合相机,较之国内外先进产品,重量轻5~8倍,是唯一一款能在轻于20公斤荷载无人飞行器上使用的低空特宽角相机。(3)MAP-AT软件空中三角测量功能可与世界先进的软件相当,而且增添了大量适用于UAV影像的功能。5.成果的创新性(1)发明了具有自检校功能的特宽角组合相机,从而可以采用轻型材料结构,使相机重量大幅度减轻,并且采用了边缘视场补偿偏斜的技术,省去了三轴云台。(2)在国内首次利用无人飞艇、无人飞机低飞、低速的良好性能,获取高清晰度、高分辨率影像,达到1:1000测图规范标准。(3)利用MAP-AT功能实现城市建筑物变化的三维全自动化监测。(4)达到24小时完成内、外业全过程,提供正射影像产品的能力。6.作用意义(1)完成深圳大运、坪山、光明、龙华四个新城区总面积424Km'2的高分辨率影像获取任务,完成1:1000正射影像图制作,创收80万元。(2)此系统安全性好、易于操作,可推广到省、市级测绘队伍。7.推广应用范围防灾救灾与应急测绘;新农村与小城镇建设;地政与矿政日常巡查监测;城市精细管理和三维规划;影像地籍;线路工程测量。
一种应用于火灾现场情况勘测的耐高温自主无人飞行器系统
成熟度:正在研发
技术类型:实用新型
应用行业:租赁和商务服务业
技术简介
本实用新型公开了用于火灾现场情况勘测的耐高温自主无人飞行器系统。 耐高温自主无人飞行器系统包括外置主控制器(17)和飞行器模型(13);所述飞行器模型(13),包括机身(4)和云台支架(8),所述机身(4)上设置有呈十字分布的四个机翼(1),每个机翼(1)与无刷电机(2)相连,继而无刷电机(2)通过无刷电调(3)与机身(4)相连;机身(4)上方设置有飞行控制板(5)和飞行控制板安装棱柱(7;机身(4)下方设置有执行部件(10)和执行部件固定柱(9),执行部件(10)外部设置有耐高温隔热罩(11)。耐高温自主无人飞行器系统能够在未知的环境中自主飞行,稳定、安全、灵活的搜救被困群众。
一种具有旋翼和气囊复合动力无人飞行器
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
摘要:本实用新型公开了一种具有旋翼和气囊复合动力无人飞行器,是为解决无人机有效载荷小、续航时间较短、抗干扰能力弱等问题和航空物探技术在航空设备和飞行员上的不足而设计的。它主要包括气囊、四个旋翼机构、共轴双桨机构和吊舱。气囊为无人机提供主要升力、克服无人机有效载荷小的缺点。共轴双桨为飞行器提供上升时部分升力,亦可反向旋转提供下降压力,用于改变飞行的高度和升降控制。通过改变不同方位的四旋翼转速,可以及时调整飞行器的飞行方向,并为飞行器提供前飞动力,提高抗风性能。该飞行器不仅适用于航空物探领域,而且还能够航拍观察、农林作业、物质运输及抗震救灾等方面,具有重载、高效、稳定、安全、方便、低廉等优点。
一种多轴飞行器与人造扑翅飞行动物的搭载结构
成熟度:通过小试
技术类型:实用新型
应用行业:制造业
技术简介
本实用新型公开一种多轴飞行器与人造扑翅飞行动物的搭载结构,专利号201520556816.2。 研发目的:儿童成人玩具,机场、养鱼场、种子场驱鸟,牧场赶羊、赶牛等。 技术基本原理: 人造扑翅飞行动物,仿音、形及飞行动作,借助多轴无人飞行器,完成扑翅飞行动物运动动作,对鸟、羊、牛等产生威摄作用,达到实用经济目的。 一种多轴飞行器与人造扑翅飞行动物的搭载结构,包括安装于多轴飞行器下端的人造扑翅飞行动物,所述人造扑翅飞行动物包括一动物壳体,所述动物壳体内安装一曲柄揺杆机构;所述曲柄摇杆机构包括一曲柄,曲柄的上端贯穿开设一电机回转中心,所述电机回转中心内安装一微电机,位于曲柄的后端安装一悬挂架,所述微电机的后端设置一固定块,所述曲柄的下端开设一曲柄轴回转中心,所述曲柄轴回转中心内安装两连杆,连杆的上下端均开设一销轴孔。人造飞行动物用悬挂架固定在无人飞行器下方,飞行动物前进、上下、左右、悬停等由多轴飞行器操控,但地面观看效果犹如飞行动物扑翅飞行,如果应用到驱鸟和赶羊等,会产生很大的威摄作用。 预期效益:投资可大可小,50万-300万,一种多轴飞行器与人造扑翅飞行动物的搭载结构主要用于场地、模具、机电配件、无人飞行器购买,可从玩具开始,然后才做飞行搭载,由小到大,市场前景是看得见的,效益是会很不错的。最初投资300万,产生1000万的效益是可以期待的,后续会更好,市场会更大。