找到30项技术成果数据。
找技术 >
智能机器人吸尘器全套自动控制解决方案寻求合作
成熟度:正在研发
技术类型:-
应用行业:制造业
技术简介
慈溪傲行智能技术有限公司是一家专业从事智能化控制系统研发的科技型企业。 公司依靠强大的技术实力和研发能力,为制造型企业提供高新技术产品,关键控制技术解决方案和技术升级服务。 傲行智能不断追求技术领先、产品卓越,以科技创新促进劳动密集型企业实现企业转型,产业升级尽绵薄之力。 项目: 智能机器人吸尘器 经过近一年的攻关研发,现已完成智能机器人的智能控制系统的工作 本控制系统包括以下关键技术: 1 路径规划技术 路径规划就是根据机器人所感知到的工作环境信息, 按照某种优化指标, 在起始点和目标点规划出一条与环境障碍无碰撞的路径, 并且实现所需清扫区域的合理完全路径覆盖,其实质就是移动机器人运动过程中的导航和避碰。 2 多传感器融合技术 为了让吸尘机器人正常工作, 必须对机器人位置、姿态、速度和系统内部状态进行监控, 还要感知机器人所处工作环境的静态和动态信息, 使得吸尘机器人相应的工作顺序和操作内容能自然地适应工作环境的变化。 吸尘机器人都采用了大量的传感器, 有效地把大量的传感器观测信息进行融合处理, 从而使机器人获得最大量的外部环境信息, 运用多传感器融合技术对提高移动机器人定位、障碍物识别、环境建模、避障的精度等具有重要作用。 3电源技术 移动电源需同时为移动机构提供动力,为控制电路提供稳定的电压,为吸尘操作模块及传感观测模块提供能源等。电源在放电过程中具备: ①保持恒定的电压; ②内阻小以便快速放电; ③可充电; ④成本低等特点。 依托以上关键技术,可实现以下产品功能: 自动检测垃圾并对较脏的区域重点清扫 自动寻找智能充电座回去充电 定时清扫 当机器被卡住会自动摆脱 支持遥控。 虚拟墙感应 边角清扫程序。 不重复清洁、不留死角和楼梯防摔自保功能 以所掌握的关键技术为基础,可扩展研发智能移动监控机器人,智能草坪割草机器人,泳池清洗机器人等市场应用产品……………. 现寻项目合作方,方式面洽,望有志于进军民用机器人产业领域的企业或个人联系洽谈.

一种多功能随身助手智能机器人
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
摘要:本实用新型公开了一种多功能随身助手智能机器人,具体涉及智能机器人技术领域。该多功能随身助手智能机器人,包括球形的壳体,所述壳体内设有中央处理器、人机交互系统、电动马达、发电机构、蓄电池和控制电路板,壳体的顶部中心处设有万向节机翼转轴和飞行翼收纳槽,万向节机翼转轴上安装有可折叠飞行翼,壳体的中部设有围绕壳体一圈的遮挡部,遮挡部的下方设有对称设置的四个可折叠太阳能电池板,壳体的底部中心处设有可收缩底座和底座收纳槽,壳体上设有彩色触摸显示屏、识别启动按钮、红外测距传感器和多媒体机构,彩色触摸显示屏、识别启动按钮、红外测距传感器和多媒体机构均与中央处理器电控连接。
一种可用于交通指挥的智能机器人
成熟度:可规模生产
技术类型:-
应用行业:制造业
技术简介
项目简介:本技术属于机器人技术领域,尤其为一种可用于交通指挥的智能机器人,包括第一壳体,位于所述第一壳体上表面的第一连接块,所述第一连接块的上表面固定有第二壳体,所述第一壳体的前表面固定有显示屏,所述第二壳体的前表面沿竖直中线对称固定有高速摄像头;通过在第一壳体的外表壁一侧转动连接有第二连接块,同时在第二连接块的一侧固定有挡臂,同时在第一壳体的内部通过螺丝固定有第一伺服电机,并且第一伺服电机的输出轴的一端贯穿第一壳体与第二连接块固定连接,通过第一伺服电机带动第二连接块的转动从而可以带动挡臂进行转动,当人行红灯亮起的时候可以将挡臂转下从而可以对行人进行阻挡。 项目核心创新点:本技术一种折叠式工业设计展架,旨在解决现有的不能很好的对内部电子元件所产生的热量进行散出,同时当防尘网长时间的使用容易出现锈蚀从而对灰尘的防护性能下降的问题。 项目详细用途:本技术应用于交通指挥中。
复杂环境理解技术与地面智能机器人
成熟度:正在研发
技术类型:-
应用行业:制造业
技术简介
项目概况:地面智能机器人是一种能够在室内和室外环境下连续的,实时的自主运动的机器人。地面智能机器人可用于反恐行动、危险场所的救援行动等危及人类安全的危险作业领域。地面智能机器人关键技术还可用于汽车主动安全领域,例如,汽车主动防撞技术、车道保持技术、夜间辅助驾驶技术、提高恶劣气象条件下能见度的相关技术等,对于提高有人驾驶车辆的驾驶安全性和自动化水平都具有重要作用。技术指标:(1)具有昼夜无人驾驶能力;(3)能保持车道、安全跟随和超越前方车辆,能识别障碍物,并能避免与行人、自行车和路边树木、电线杆等物体碰撞;(4)可以在小雨、薄雾的环境下自主驾驶;(5)具有根据道路环境,自适应调整速度的能力。知识产权:发明专利项目水平:国内领先成熟程度:样机市场前景:地面智能机器人可用于反恐行动、危险场所的救援行动等危及人类安全的危险作业领域。其关键技术还可用于汽车主动安全技术领域,具有非常大的国内和国际市场。合作方式:合作开发、专利许可、技术转让、技术入股
自主移动式智能机器人
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
摘要:一种自主移动式智能机器人,设置有移动主体、通过电机驱动的转轮、电源管理模块、一组以上的超声波测距模块、电机控制模块和主控模块;所述转轮装配于所述移动主体,所述电源管理模块、超声波测距模块、电机控制模块和所述主控模块设置于所述移动主体,所述电源管理模块分别与所述超声波测距模块、主控模块电连接,所述超声波测距模块与所述主控模块连接,所述主控模块与所述电机控制模块连接,所述电机控制模块与所述电机连接;还设置有红外追踪模块,所述红外追踪模块与所述主控模块电连接。该自主移动式智能机器人具有成本低廉、数据处理简单、反应迅速的特点。
危害气体智能安全监控网络化系统
成熟度:通过中试
技术类型:-
应用行业:制造业,交通运输、仓储和邮政业
技术简介
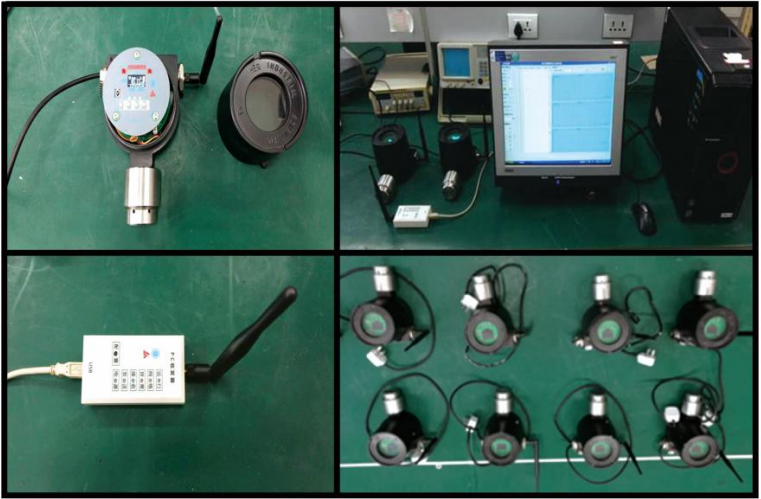
一、内容简介已有专利技术,有待完善的系统样机等,系统由多个固定传感器监测节点、主动嗅觉巡检智能机器人以及空中无,人机组成三维立体的基于物联网架构的无线传感器网络监控系统。为实现快速、准确、可靠地定位危险气体泄漏源,通过“发现-追踪-定位”三个环节和“固定监测-地面移动追踪-空中可视搜寻”三种方式解决问题。二、技术特点及主要技术指标系统由多个固定监测节点、主动嗅觉巡检智能机器人以及空中无人机组成三维立体的基于物联网架构的无线传感器网络监控系统;气味罗盘装置可以根据风速、风向以及泄露气体浓度梯度数据判别气体泄漏源的方位;智能机器入自主搜寻气体泄漏轨迹及定位泄漏源算法;基于物联网架构的危险气体无线传感器网络监控平台。供电方式外接电源( 200~240V AC )。输入额定电流: 130mA。额定功率: 3.50W。响应时间:≤30s。检测对象:有毒有害气体,温度,湿度。测量范围:气体浓度0~20ppm;温度-20.0C~ 70.0C; 湿度10%RH~90%RH;对应输出电压:DC0.60~3.00V。精度: 5%(正常大条件下,出厂标定)。三、预期经济效益预计用于煤炭、石油、化工油气运输、能源生产、交通运输航空航天等行业有着极大的市场需求。

一种米粒形象的智能机器人服务员
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
本实用新型公开了一种米粒形象的智能机器人服务员。 该智能机器人服务员包括头部,身体;所述头部设于身体的上端;所述头部内部设有无线信号接收发射器;所述身体包括上半身和下半身;所述上半身的两侧均设有手臂;在两手臂之间设有餐盘支架;在下半身设有运动装置。该智能机器人服务员,在实现服务的同时,以智能现代化的方式提高效率,节约劳动力,吸引消费者。

一种用于牙齿开髓牙体预备的智能机器人
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
本发明公开了一种用于牙齿开髓牙体预备的智能机器人。 智能机器人包括卡槽、X轴运动载板、钻头角度微调口、Y轴运动杆、钻头角度微调杆、Z轴运动杆、控制驱动机构、冲洗回吸机构、钻头;控制驱动机构固定安装在所述的Z轴运动杆上,分别与X轴运动载板驱动机构、Y轴运动杆驱动机构、Z轴运动杆驱动机构、钻头角度微调杆驱动机构、冲洗回吸机构、钻头连接,用于接收外部计算机的控制信息,控制所述的X轴运动载板、Y轴运动杆、Z轴运动杆、钻头角度微调杆、冲洗回吸机构、钻头工作。本智能机器人可以基于对数字化牙齿解剖结构数据的分析,精确驱动钻头对目标牙齿的牙体进行预备成形和髓腔打开。
智能机器人世界唯一类人智能机器人
成熟度:通过小试
技术类型:-
应用行业:制造业
技术简介
世界唯一类人智能机器人电脑能做的事情 机器人都能做 万能机器人可制造成变形金刚 ”晴天柱“工业机器人万能机器技术转让。进行机器人设计方案设计,提出主要技术参数,进行技术性可行性分析。进行机械构件设计,进行材料选取和强度计算。进行电气控制设计,确定控制方式和主要电气元件的品牌、规格型号等。进行工作图设计。若有相关的技术,请与本人联系。
机器人精度补偿技术与高精度智能机器人加工装备
成熟度:正在研发
技术类型:-
应用行业:制造业
技术简介
p 一、 成果简介机器人精度补偿技术与高精度机器人智能加工装备面向航空航天及高端民用产品数字 化智能制造领域,提供机器人加工装备整体解决方案设计、核心技术服务等研究性工作。重 点突破机器人高精度补偿、刚度增强、任务规划、智能末端执行器、集成控制的核心技术, 形成高精度机器人作业平台,通过装载制孔、铆接、铣削、测量等多功能末端执行器形成高 精度智能机器人加工装备。二、 创新点1.提出综合关节伺服控制和定位误差深度学习的机器人绝对定位精度补偿策略,实现机 器人的精确控制与实时补偿。2.提出基于在线感知的加工任务离线规划方法,实现钻铆工艺离线任务的智能规划。3.提出融合视觉、触觉、听觉和主轴功率感知的智能钻铆一体化多功能末端执行器模块 化结构,实现钻铆状态实时动态感知与钻铆质量在线监测。4.提出基于钻铆工艺学习样本库的深度置信网络学习策略,形成基于钻铆工艺深度学习 的自适应控制方法。 img title="e:\k8008\qiuchengcai\桌面\成果图片\南航成果图片\领域\图片47.png" alt="e:\k8008\qiuchengcai\桌面\成果图片\南航成果图片\领域\图片47.png" src="https://ue-upload.1633.com/2020/0429/1601410805892.png"/ img title="e:\k8008\qiuchengcai\桌面\成果图片\南航成果图片\领域\图片48.png" alt="e:\k8008\qiuchengcai\桌面\成果图片\南航成果图片\领域\图片48.png" src="https://ue-upload.1633.com/2020/0429/1601366579532.png"/ /p






找到30项技术成果数据。
找技术 >智能机器人吸尘器全套自动控制解决方案寻求合作
成熟度:正在研发
技术类型:-
应用行业:制造业
技术简介
慈溪傲行智能技术有限公司是一家专业从事智能化控制系统研发的科技型企业。 公司依靠强大的技术实力和研发能力,为制造型企业提供高新技术产品,关键控制技术解决方案和技术升级服务。 傲行智能不断追求技术领先、产品卓越,以科技创新促进劳动密集型企业实现企业转型,产业升级尽绵薄之力。 项目: 智能机器人吸尘器 经过近一年的攻关研发,现已完成智能机器人的智能控制系统的工作 本控制系统包括以下关键技术: 1 路径规划技术 路径规划就是根据机器人所感知到的工作环境信息, 按照某种优化指标, 在起始点和目标点规划出一条与环境障碍无碰撞的路径, 并且实现所需清扫区域的合理完全路径覆盖,其实质就是移动机器人运动过程中的导航和避碰。 2 多传感器融合技术 为了让吸尘机器人正常工作, 必须对机器人位置、姿态、速度和系统内部状态进行监控, 还要感知机器人所处工作环境的静态和动态信息, 使得吸尘机器人相应的工作顺序和操作内容能自然地适应工作环境的变化。 吸尘机器人都采用了大量的传感器, 有效地把大量的传感器观测信息进行融合处理, 从而使机器人获得最大量的外部环境信息, 运用多传感器融合技术对提高移动机器人定位、障碍物识别、环境建模、避障的精度等具有重要作用。 3电源技术 移动电源需同时为移动机构提供动力,为控制电路提供稳定的电压,为吸尘操作模块及传感观测模块提供能源等。电源在放电过程中具备: ①保持恒定的电压; ②内阻小以便快速放电; ③可充电; ④成本低等特点。 依托以上关键技术,可实现以下产品功能: 自动检测垃圾并对较脏的区域重点清扫 自动寻找智能充电座回去充电 定时清扫 当机器被卡住会自动摆脱 支持遥控。 虚拟墙感应 边角清扫程序。 不重复清洁、不留死角和楼梯防摔自保功能 以所掌握的关键技术为基础,可扩展研发智能移动监控机器人,智能草坪割草机器人,泳池清洗机器人等市场应用产品……………. 现寻项目合作方,方式面洽,望有志于进军民用机器人产业领域的企业或个人联系洽谈.
一种多功能随身助手智能机器人
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
摘要:本实用新型公开了一种多功能随身助手智能机器人,具体涉及智能机器人技术领域。该多功能随身助手智能机器人,包括球形的壳体,所述壳体内设有中央处理器、人机交互系统、电动马达、发电机构、蓄电池和控制电路板,壳体的顶部中心处设有万向节机翼转轴和飞行翼收纳槽,万向节机翼转轴上安装有可折叠飞行翼,壳体的中部设有围绕壳体一圈的遮挡部,遮挡部的下方设有对称设置的四个可折叠太阳能电池板,壳体的底部中心处设有可收缩底座和底座收纳槽,壳体上设有彩色触摸显示屏、识别启动按钮、红外测距传感器和多媒体机构,彩色触摸显示屏、识别启动按钮、红外测距传感器和多媒体机构均与中央处理器电控连接。
一种可用于交通指挥的智能机器人
成熟度:可规模生产
技术类型:-
应用行业:制造业
技术简介
项目简介:本技术属于机器人技术领域,尤其为一种可用于交通指挥的智能机器人,包括第一壳体,位于所述第一壳体上表面的第一连接块,所述第一连接块的上表面固定有第二壳体,所述第一壳体的前表面固定有显示屏,所述第二壳体的前表面沿竖直中线对称固定有高速摄像头;通过在第一壳体的外表壁一侧转动连接有第二连接块,同时在第二连接块的一侧固定有挡臂,同时在第一壳体的内部通过螺丝固定有第一伺服电机,并且第一伺服电机的输出轴的一端贯穿第一壳体与第二连接块固定连接,通过第一伺服电机带动第二连接块的转动从而可以带动挡臂进行转动,当人行红灯亮起的时候可以将挡臂转下从而可以对行人进行阻挡。 项目核心创新点:本技术一种折叠式工业设计展架,旨在解决现有的不能很好的对内部电子元件所产生的热量进行散出,同时当防尘网长时间的使用容易出现锈蚀从而对灰尘的防护性能下降的问题。 项目详细用途:本技术应用于交通指挥中。
复杂环境理解技术与地面智能机器人
成熟度:正在研发
技术类型:-
应用行业:制造业
技术简介
项目概况:地面智能机器人是一种能够在室内和室外环境下连续的,实时的自主运动的机器人。地面智能机器人可用于反恐行动、危险场所的救援行动等危及人类安全的危险作业领域。地面智能机器人关键技术还可用于汽车主动安全领域,例如,汽车主动防撞技术、车道保持技术、夜间辅助驾驶技术、提高恶劣气象条件下能见度的相关技术等,对于提高有人驾驶车辆的驾驶安全性和自动化水平都具有重要作用。技术指标:(1)具有昼夜无人驾驶能力;(3)能保持车道、安全跟随和超越前方车辆,能识别障碍物,并能避免与行人、自行车和路边树木、电线杆等物体碰撞;(4)可以在小雨、薄雾的环境下自主驾驶;(5)具有根据道路环境,自适应调整速度的能力。知识产权:发明专利项目水平:国内领先成熟程度:样机市场前景:地面智能机器人可用于反恐行动、危险场所的救援行动等危及人类安全的危险作业领域。其关键技术还可用于汽车主动安全技术领域,具有非常大的国内和国际市场。合作方式:合作开发、专利许可、技术转让、技术入股
自主移动式智能机器人
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
摘要:一种自主移动式智能机器人,设置有移动主体、通过电机驱动的转轮、电源管理模块、一组以上的超声波测距模块、电机控制模块和主控模块;所述转轮装配于所述移动主体,所述电源管理模块、超声波测距模块、电机控制模块和所述主控模块设置于所述移动主体,所述电源管理模块分别与所述超声波测距模块、主控模块电连接,所述超声波测距模块与所述主控模块连接,所述主控模块与所述电机控制模块连接,所述电机控制模块与所述电机连接;还设置有红外追踪模块,所述红外追踪模块与所述主控模块电连接。该自主移动式智能机器人具有成本低廉、数据处理简单、反应迅速的特点。
危害气体智能安全监控网络化系统
成熟度:通过中试
技术类型:-
应用行业:制造业,交通运输、仓储和邮政业
技术简介
一、内容简介已有专利技术,有待完善的系统样机等,系统由多个固定传感器监测节点、主动嗅觉巡检智能机器人以及空中无,人机组成三维立体的基于物联网架构的无线传感器网络监控系统。为实现快速、准确、可靠地定位危险气体泄漏源,通过“发现-追踪-定位”三个环节和“固定监测-地面移动追踪-空中可视搜寻”三种方式解决问题。二、技术特点及主要技术指标系统由多个固定监测节点、主动嗅觉巡检智能机器人以及空中无人机组成三维立体的基于物联网架构的无线传感器网络监控系统;气味罗盘装置可以根据风速、风向以及泄露气体浓度梯度数据判别气体泄漏源的方位;智能机器入自主搜寻气体泄漏轨迹及定位泄漏源算法;基于物联网架构的危险气体无线传感器网络监控平台。供电方式外接电源( 200~240V AC )。输入额定电流: 130mA。额定功率: 3.50W。响应时间:≤30s。检测对象:有毒有害气体,温度,湿度。测量范围:气体浓度0~20ppm;温度-20.0C~ 70.0C; 湿度10%RH~90%RH;对应输出电压:DC0.60~3.00V。精度: 5%(正常大条件下,出厂标定)。三、预期经济效益预计用于煤炭、石油、化工油气运输、能源生产、交通运输航空航天等行业有着极大的市场需求。
一种米粒形象的智能机器人服务员
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
本实用新型公开了一种米粒形象的智能机器人服务员。 该智能机器人服务员包括头部,身体;所述头部设于身体的上端;所述头部内部设有无线信号接收发射器;所述身体包括上半身和下半身;所述上半身的两侧均设有手臂;在两手臂之间设有餐盘支架;在下半身设有运动装置。该智能机器人服务员,在实现服务的同时,以智能现代化的方式提高效率,节约劳动力,吸引消费者。
一种用于牙齿开髓牙体预备的智能机器人
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
本发明公开了一种用于牙齿开髓牙体预备的智能机器人。 智能机器人包括卡槽、X轴运动载板、钻头角度微调口、Y轴运动杆、钻头角度微调杆、Z轴运动杆、控制驱动机构、冲洗回吸机构、钻头;控制驱动机构固定安装在所述的Z轴运动杆上,分别与X轴运动载板驱动机构、Y轴运动杆驱动机构、Z轴运动杆驱动机构、钻头角度微调杆驱动机构、冲洗回吸机构、钻头连接,用于接收外部计算机的控制信息,控制所述的X轴运动载板、Y轴运动杆、Z轴运动杆、钻头角度微调杆、冲洗回吸机构、钻头工作。本智能机器人可以基于对数字化牙齿解剖结构数据的分析,精确驱动钻头对目标牙齿的牙体进行预备成形和髓腔打开。
智能机器人世界唯一类人智能机器人
成熟度:通过小试
技术类型:-
应用行业:制造业
技术简介
世界唯一类人智能机器人电脑能做的事情 机器人都能做 万能机器人可制造成变形金刚 ”晴天柱“工业机器人万能机器技术转让。进行机器人设计方案设计,提出主要技术参数,进行技术性可行性分析。进行机械构件设计,进行材料选取和强度计算。进行电气控制设计,确定控制方式和主要电气元件的品牌、规格型号等。进行工作图设计。若有相关的技术,请与本人联系。
机器人精度补偿技术与高精度智能机器人加工装备
成熟度:正在研发
技术类型:-
应用行业:制造业
技术简介
p 一、 成果简介机器人精度补偿技术与高精度机器人智能加工装备面向航空航天及高端民用产品数字 化智能制造领域,提供机器人加工装备整体解决方案设计、核心技术服务等研究性工作。重 点突破机器人高精度补偿、刚度增强、任务规划、智能末端执行器、集成控制的核心技术, 形成高精度机器人作业平台,通过装载制孔、铆接、铣削、测量等多功能末端执行器形成高 精度智能机器人加工装备。二、 创新点1.提出综合关节伺服控制和定位误差深度学习的机器人绝对定位精度补偿策略,实现机 器人的精确控制与实时补偿。2.提出基于在线感知的加工任务离线规划方法,实现钻铆工艺离线任务的智能规划。3.提出融合视觉、触觉、听觉和主轴功率感知的智能钻铆一体化多功能末端执行器模块 化结构,实现钻铆状态实时动态感知与钻铆质量在线监测。4.提出基于钻铆工艺学习样本库的深度置信网络学习策略,形成基于钻铆工艺深度学习 的自适应控制方法。 img title="e:\k8008\qiuchengcai\桌面\成果图片\南航成果图片\领域\图片47.png" alt="e:\k8008\qiuchengcai\桌面\成果图片\南航成果图片\领域\图片47.png" src="https://ue-upload.1633.com/2020/0429/1601410805892.png"/ img title="e:\k8008\qiuchengcai\桌面\成果图片\南航成果图片\领域\图片48.png" alt="e:\k8008\qiuchengcai\桌面\成果图片\南航成果图片\领域\图片48.png" src="https://ue-upload.1633.com/2020/0429/1601366579532.png"/ /p
找到30项技术成果数据。
找技术 >智能机器人吸尘器全套自动控制解决方案寻求合作
成熟度:正在研发
技术类型:-
应用行业:制造业
技术简介
慈溪傲行智能技术有限公司是一家专业从事智能化控制系统研发的科技型企业。 公司依靠强大的技术实力和研发能力,为制造型企业提供高新技术产品,关键控制技术解决方案和技术升级服务。 傲行智能不断追求技术领先、产品卓越,以科技创新促进劳动密集型企业实现企业转型,产业升级尽绵薄之力。 项目: 智能机器人吸尘器 经过近一年的攻关研发,现已完成智能机器人的智能控制系统的工作 本控制系统包括以下关键技术: 1 路径规划技术 路径规划就是根据机器人所感知到的工作环境信息, 按照某种优化指标, 在起始点和目标点规划出一条与环境障碍无碰撞的路径, 并且实现所需清扫区域的合理完全路径覆盖,其实质就是移动机器人运动过程中的导航和避碰。 2 多传感器融合技术 为了让吸尘机器人正常工作, 必须对机器人位置、姿态、速度和系统内部状态进行监控, 还要感知机器人所处工作环境的静态和动态信息, 使得吸尘机器人相应的工作顺序和操作内容能自然地适应工作环境的变化。 吸尘机器人都采用了大量的传感器, 有效地把大量的传感器观测信息进行融合处理, 从而使机器人获得最大量的外部环境信息, 运用多传感器融合技术对提高移动机器人定位、障碍物识别、环境建模、避障的精度等具有重要作用。 3电源技术 移动电源需同时为移动机构提供动力,为控制电路提供稳定的电压,为吸尘操作模块及传感观测模块提供能源等。电源在放电过程中具备: ①保持恒定的电压; ②内阻小以便快速放电; ③可充电; ④成本低等特点。 依托以上关键技术,可实现以下产品功能: 自动检测垃圾并对较脏的区域重点清扫 自动寻找智能充电座回去充电 定时清扫 当机器被卡住会自动摆脱 支持遥控。 虚拟墙感应 边角清扫程序。 不重复清洁、不留死角和楼梯防摔自保功能 以所掌握的关键技术为基础,可扩展研发智能移动监控机器人,智能草坪割草机器人,泳池清洗机器人等市场应用产品……………. 现寻项目合作方,方式面洽,望有志于进军民用机器人产业领域的企业或个人联系洽谈.
一种多功能随身助手智能机器人
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
摘要:本实用新型公开了一种多功能随身助手智能机器人,具体涉及智能机器人技术领域。该多功能随身助手智能机器人,包括球形的壳体,所述壳体内设有中央处理器、人机交互系统、电动马达、发电机构、蓄电池和控制电路板,壳体的顶部中心处设有万向节机翼转轴和飞行翼收纳槽,万向节机翼转轴上安装有可折叠飞行翼,壳体的中部设有围绕壳体一圈的遮挡部,遮挡部的下方设有对称设置的四个可折叠太阳能电池板,壳体的底部中心处设有可收缩底座和底座收纳槽,壳体上设有彩色触摸显示屏、识别启动按钮、红外测距传感器和多媒体机构,彩色触摸显示屏、识别启动按钮、红外测距传感器和多媒体机构均与中央处理器电控连接。
一种可用于交通指挥的智能机器人
成熟度:可规模生产
技术类型:-
应用行业:制造业
技术简介
项目简介:本技术属于机器人技术领域,尤其为一种可用于交通指挥的智能机器人,包括第一壳体,位于所述第一壳体上表面的第一连接块,所述第一连接块的上表面固定有第二壳体,所述第一壳体的前表面固定有显示屏,所述第二壳体的前表面沿竖直中线对称固定有高速摄像头;通过在第一壳体的外表壁一侧转动连接有第二连接块,同时在第二连接块的一侧固定有挡臂,同时在第一壳体的内部通过螺丝固定有第一伺服电机,并且第一伺服电机的输出轴的一端贯穿第一壳体与第二连接块固定连接,通过第一伺服电机带动第二连接块的转动从而可以带动挡臂进行转动,当人行红灯亮起的时候可以将挡臂转下从而可以对行人进行阻挡。 项目核心创新点:本技术一种折叠式工业设计展架,旨在解决现有的不能很好的对内部电子元件所产生的热量进行散出,同时当防尘网长时间的使用容易出现锈蚀从而对灰尘的防护性能下降的问题。 项目详细用途:本技术应用于交通指挥中。
复杂环境理解技术与地面智能机器人
成熟度:正在研发
技术类型:-
应用行业:制造业
技术简介
项目概况:地面智能机器人是一种能够在室内和室外环境下连续的,实时的自主运动的机器人。地面智能机器人可用于反恐行动、危险场所的救援行动等危及人类安全的危险作业领域。地面智能机器人关键技术还可用于汽车主动安全领域,例如,汽车主动防撞技术、车道保持技术、夜间辅助驾驶技术、提高恶劣气象条件下能见度的相关技术等,对于提高有人驾驶车辆的驾驶安全性和自动化水平都具有重要作用。技术指标:(1)具有昼夜无人驾驶能力;(3)能保持车道、安全跟随和超越前方车辆,能识别障碍物,并能避免与行人、自行车和路边树木、电线杆等物体碰撞;(4)可以在小雨、薄雾的环境下自主驾驶;(5)具有根据道路环境,自适应调整速度的能力。知识产权:发明专利项目水平:国内领先成熟程度:样机市场前景:地面智能机器人可用于反恐行动、危险场所的救援行动等危及人类安全的危险作业领域。其关键技术还可用于汽车主动安全技术领域,具有非常大的国内和国际市场。合作方式:合作开发、专利许可、技术转让、技术入股
自主移动式智能机器人
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
摘要:一种自主移动式智能机器人,设置有移动主体、通过电机驱动的转轮、电源管理模块、一组以上的超声波测距模块、电机控制模块和主控模块;所述转轮装配于所述移动主体,所述电源管理模块、超声波测距模块、电机控制模块和所述主控模块设置于所述移动主体,所述电源管理模块分别与所述超声波测距模块、主控模块电连接,所述超声波测距模块与所述主控模块连接,所述主控模块与所述电机控制模块连接,所述电机控制模块与所述电机连接;还设置有红外追踪模块,所述红外追踪模块与所述主控模块电连接。该自主移动式智能机器人具有成本低廉、数据处理简单、反应迅速的特点。
危害气体智能安全监控网络化系统
成熟度:通过中试
技术类型:-
应用行业:制造业,交通运输、仓储和邮政业
技术简介
一、内容简介已有专利技术,有待完善的系统样机等,系统由多个固定传感器监测节点、主动嗅觉巡检智能机器人以及空中无,人机组成三维立体的基于物联网架构的无线传感器网络监控系统。为实现快速、准确、可靠地定位危险气体泄漏源,通过“发现-追踪-定位”三个环节和“固定监测-地面移动追踪-空中可视搜寻”三种方式解决问题。二、技术特点及主要技术指标系统由多个固定监测节点、主动嗅觉巡检智能机器人以及空中无人机组成三维立体的基于物联网架构的无线传感器网络监控系统;气味罗盘装置可以根据风速、风向以及泄露气体浓度梯度数据判别气体泄漏源的方位;智能机器入自主搜寻气体泄漏轨迹及定位泄漏源算法;基于物联网架构的危险气体无线传感器网络监控平台。供电方式外接电源( 200~240V AC )。输入额定电流: 130mA。额定功率: 3.50W。响应时间:≤30s。检测对象:有毒有害气体,温度,湿度。测量范围:气体浓度0~20ppm;温度-20.0C~ 70.0C; 湿度10%RH~90%RH;对应输出电压:DC0.60~3.00V。精度: 5%(正常大条件下,出厂标定)。三、预期经济效益预计用于煤炭、石油、化工油气运输、能源生产、交通运输航空航天等行业有着极大的市场需求。
一种米粒形象的智能机器人服务员
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
本实用新型公开了一种米粒形象的智能机器人服务员。 该智能机器人服务员包括头部,身体;所述头部设于身体的上端;所述头部内部设有无线信号接收发射器;所述身体包括上半身和下半身;所述上半身的两侧均设有手臂;在两手臂之间设有餐盘支架;在下半身设有运动装置。该智能机器人服务员,在实现服务的同时,以智能现代化的方式提高效率,节约劳动力,吸引消费者。
一种用于牙齿开髓牙体预备的智能机器人
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
本发明公开了一种用于牙齿开髓牙体预备的智能机器人。 智能机器人包括卡槽、X轴运动载板、钻头角度微调口、Y轴运动杆、钻头角度微调杆、Z轴运动杆、控制驱动机构、冲洗回吸机构、钻头;控制驱动机构固定安装在所述的Z轴运动杆上,分别与X轴运动载板驱动机构、Y轴运动杆驱动机构、Z轴运动杆驱动机构、钻头角度微调杆驱动机构、冲洗回吸机构、钻头连接,用于接收外部计算机的控制信息,控制所述的X轴运动载板、Y轴运动杆、Z轴运动杆、钻头角度微调杆、冲洗回吸机构、钻头工作。本智能机器人可以基于对数字化牙齿解剖结构数据的分析,精确驱动钻头对目标牙齿的牙体进行预备成形和髓腔打开。
智能机器人世界唯一类人智能机器人
成熟度:通过小试
技术类型:-
应用行业:制造业
技术简介
世界唯一类人智能机器人电脑能做的事情 机器人都能做 万能机器人可制造成变形金刚 ”晴天柱“工业机器人万能机器技术转让。进行机器人设计方案设计,提出主要技术参数,进行技术性可行性分析。进行机械构件设计,进行材料选取和强度计算。进行电气控制设计,确定控制方式和主要电气元件的品牌、规格型号等。进行工作图设计。若有相关的技术,请与本人联系。
机器人精度补偿技术与高精度智能机器人加工装备
成熟度:正在研发
技术类型:-
应用行业:制造业
技术简介
p 一、 成果简介机器人精度补偿技术与高精度机器人智能加工装备面向航空航天及高端民用产品数字 化智能制造领域,提供机器人加工装备整体解决方案设计、核心技术服务等研究性工作。重 点突破机器人高精度补偿、刚度增强、任务规划、智能末端执行器、集成控制的核心技术, 形成高精度机器人作业平台,通过装载制孔、铆接、铣削、测量等多功能末端执行器形成高 精度智能机器人加工装备。二、 创新点1.提出综合关节伺服控制和定位误差深度学习的机器人绝对定位精度补偿策略,实现机 器人的精确控制与实时补偿。2.提出基于在线感知的加工任务离线规划方法,实现钻铆工艺离线任务的智能规划。3.提出融合视觉、触觉、听觉和主轴功率感知的智能钻铆一体化多功能末端执行器模块 化结构,实现钻铆状态实时动态感知与钻铆质量在线监测。4.提出基于钻铆工艺学习样本库的深度置信网络学习策略,形成基于钻铆工艺深度学习 的自适应控制方法。 img title="e:\k8008\qiuchengcai\桌面\成果图片\南航成果图片\领域\图片47.png" alt="e:\k8008\qiuchengcai\桌面\成果图片\南航成果图片\领域\图片47.png" src="https://ue-upload.1633.com/2020/0429/1601410805892.png"/ img title="e:\k8008\qiuchengcai\桌面\成果图片\南航成果图片\领域\图片48.png" alt="e:\k8008\qiuchengcai\桌面\成果图片\南航成果图片\领域\图片48.png" src="https://ue-upload.1633.com/2020/0429/1601366579532.png"/ /p
找到30项技术成果数据。
找技术 >智能机器人吸尘器全套自动控制解决方案寻求合作
成熟度:正在研发
技术类型:-
应用行业:制造业
技术简介
慈溪傲行智能技术有限公司是一家专业从事智能化控制系统研发的科技型企业。 公司依靠强大的技术实力和研发能力,为制造型企业提供高新技术产品,关键控制技术解决方案和技术升级服务。 傲行智能不断追求技术领先、产品卓越,以科技创新促进劳动密集型企业实现企业转型,产业升级尽绵薄之力。 项目: 智能机器人吸尘器 经过近一年的攻关研发,现已完成智能机器人的智能控制系统的工作 本控制系统包括以下关键技术: 1 路径规划技术 路径规划就是根据机器人所感知到的工作环境信息, 按照某种优化指标, 在起始点和目标点规划出一条与环境障碍无碰撞的路径, 并且实现所需清扫区域的合理完全路径覆盖,其实质就是移动机器人运动过程中的导航和避碰。 2 多传感器融合技术 为了让吸尘机器人正常工作, 必须对机器人位置、姿态、速度和系统内部状态进行监控, 还要感知机器人所处工作环境的静态和动态信息, 使得吸尘机器人相应的工作顺序和操作内容能自然地适应工作环境的变化。 吸尘机器人都采用了大量的传感器, 有效地把大量的传感器观测信息进行融合处理, 从而使机器人获得最大量的外部环境信息, 运用多传感器融合技术对提高移动机器人定位、障碍物识别、环境建模、避障的精度等具有重要作用。 3电源技术 移动电源需同时为移动机构提供动力,为控制电路提供稳定的电压,为吸尘操作模块及传感观测模块提供能源等。电源在放电过程中具备: ①保持恒定的电压; ②内阻小以便快速放电; ③可充电; ④成本低等特点。 依托以上关键技术,可实现以下产品功能: 自动检测垃圾并对较脏的区域重点清扫 自动寻找智能充电座回去充电 定时清扫 当机器被卡住会自动摆脱 支持遥控。 虚拟墙感应 边角清扫程序。 不重复清洁、不留死角和楼梯防摔自保功能 以所掌握的关键技术为基础,可扩展研发智能移动监控机器人,智能草坪割草机器人,泳池清洗机器人等市场应用产品……………. 现寻项目合作方,方式面洽,望有志于进军民用机器人产业领域的企业或个人联系洽谈.
一种多功能随身助手智能机器人
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
摘要:本实用新型公开了一种多功能随身助手智能机器人,具体涉及智能机器人技术领域。该多功能随身助手智能机器人,包括球形的壳体,所述壳体内设有中央处理器、人机交互系统、电动马达、发电机构、蓄电池和控制电路板,壳体的顶部中心处设有万向节机翼转轴和飞行翼收纳槽,万向节机翼转轴上安装有可折叠飞行翼,壳体的中部设有围绕壳体一圈的遮挡部,遮挡部的下方设有对称设置的四个可折叠太阳能电池板,壳体的底部中心处设有可收缩底座和底座收纳槽,壳体上设有彩色触摸显示屏、识别启动按钮、红外测距传感器和多媒体机构,彩色触摸显示屏、识别启动按钮、红外测距传感器和多媒体机构均与中央处理器电控连接。
一种可用于交通指挥的智能机器人
成熟度:可规模生产
技术类型:-
应用行业:制造业
技术简介
项目简介:本技术属于机器人技术领域,尤其为一种可用于交通指挥的智能机器人,包括第一壳体,位于所述第一壳体上表面的第一连接块,所述第一连接块的上表面固定有第二壳体,所述第一壳体的前表面固定有显示屏,所述第二壳体的前表面沿竖直中线对称固定有高速摄像头;通过在第一壳体的外表壁一侧转动连接有第二连接块,同时在第二连接块的一侧固定有挡臂,同时在第一壳体的内部通过螺丝固定有第一伺服电机,并且第一伺服电机的输出轴的一端贯穿第一壳体与第二连接块固定连接,通过第一伺服电机带动第二连接块的转动从而可以带动挡臂进行转动,当人行红灯亮起的时候可以将挡臂转下从而可以对行人进行阻挡。 项目核心创新点:本技术一种折叠式工业设计展架,旨在解决现有的不能很好的对内部电子元件所产生的热量进行散出,同时当防尘网长时间的使用容易出现锈蚀从而对灰尘的防护性能下降的问题。 项目详细用途:本技术应用于交通指挥中。
复杂环境理解技术与地面智能机器人
成熟度:正在研发
技术类型:-
应用行业:制造业
技术简介
项目概况:地面智能机器人是一种能够在室内和室外环境下连续的,实时的自主运动的机器人。地面智能机器人可用于反恐行动、危险场所的救援行动等危及人类安全的危险作业领域。地面智能机器人关键技术还可用于汽车主动安全领域,例如,汽车主动防撞技术、车道保持技术、夜间辅助驾驶技术、提高恶劣气象条件下能见度的相关技术等,对于提高有人驾驶车辆的驾驶安全性和自动化水平都具有重要作用。技术指标:(1)具有昼夜无人驾驶能力;(3)能保持车道、安全跟随和超越前方车辆,能识别障碍物,并能避免与行人、自行车和路边树木、电线杆等物体碰撞;(4)可以在小雨、薄雾的环境下自主驾驶;(5)具有根据道路环境,自适应调整速度的能力。知识产权:发明专利项目水平:国内领先成熟程度:样机市场前景:地面智能机器人可用于反恐行动、危险场所的救援行动等危及人类安全的危险作业领域。其关键技术还可用于汽车主动安全技术领域,具有非常大的国内和国际市场。合作方式:合作开发、专利许可、技术转让、技术入股
自主移动式智能机器人
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
摘要:一种自主移动式智能机器人,设置有移动主体、通过电机驱动的转轮、电源管理模块、一组以上的超声波测距模块、电机控制模块和主控模块;所述转轮装配于所述移动主体,所述电源管理模块、超声波测距模块、电机控制模块和所述主控模块设置于所述移动主体,所述电源管理模块分别与所述超声波测距模块、主控模块电连接,所述超声波测距模块与所述主控模块连接,所述主控模块与所述电机控制模块连接,所述电机控制模块与所述电机连接;还设置有红外追踪模块,所述红外追踪模块与所述主控模块电连接。该自主移动式智能机器人具有成本低廉、数据处理简单、反应迅速的特点。
危害气体智能安全监控网络化系统
成熟度:通过中试
技术类型:-
应用行业:制造业,交通运输、仓储和邮政业
技术简介
一、内容简介已有专利技术,有待完善的系统样机等,系统由多个固定传感器监测节点、主动嗅觉巡检智能机器人以及空中无,人机组成三维立体的基于物联网架构的无线传感器网络监控系统。为实现快速、准确、可靠地定位危险气体泄漏源,通过“发现-追踪-定位”三个环节和“固定监测-地面移动追踪-空中可视搜寻”三种方式解决问题。二、技术特点及主要技术指标系统由多个固定监测节点、主动嗅觉巡检智能机器人以及空中无人机组成三维立体的基于物联网架构的无线传感器网络监控系统;气味罗盘装置可以根据风速、风向以及泄露气体浓度梯度数据判别气体泄漏源的方位;智能机器入自主搜寻气体泄漏轨迹及定位泄漏源算法;基于物联网架构的危险气体无线传感器网络监控平台。供电方式外接电源( 200~240V AC )。输入额定电流: 130mA。额定功率: 3.50W。响应时间:≤30s。检测对象:有毒有害气体,温度,湿度。测量范围:气体浓度0~20ppm;温度-20.0C~ 70.0C; 湿度10%RH~90%RH;对应输出电压:DC0.60~3.00V。精度: 5%(正常大条件下,出厂标定)。三、预期经济效益预计用于煤炭、石油、化工油气运输、能源生产、交通运输航空航天等行业有着极大的市场需求。
一种米粒形象的智能机器人服务员
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
本实用新型公开了一种米粒形象的智能机器人服务员。 该智能机器人服务员包括头部,身体;所述头部设于身体的上端;所述头部内部设有无线信号接收发射器;所述身体包括上半身和下半身;所述上半身的两侧均设有手臂;在两手臂之间设有餐盘支架;在下半身设有运动装置。该智能机器人服务员,在实现服务的同时,以智能现代化的方式提高效率,节约劳动力,吸引消费者。
一种用于牙齿开髓牙体预备的智能机器人
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
本发明公开了一种用于牙齿开髓牙体预备的智能机器人。 智能机器人包括卡槽、X轴运动载板、钻头角度微调口、Y轴运动杆、钻头角度微调杆、Z轴运动杆、控制驱动机构、冲洗回吸机构、钻头;控制驱动机构固定安装在所述的Z轴运动杆上,分别与X轴运动载板驱动机构、Y轴运动杆驱动机构、Z轴运动杆驱动机构、钻头角度微调杆驱动机构、冲洗回吸机构、钻头连接,用于接收外部计算机的控制信息,控制所述的X轴运动载板、Y轴运动杆、Z轴运动杆、钻头角度微调杆、冲洗回吸机构、钻头工作。本智能机器人可以基于对数字化牙齿解剖结构数据的分析,精确驱动钻头对目标牙齿的牙体进行预备成形和髓腔打开。
智能机器人世界唯一类人智能机器人
成熟度:通过小试
技术类型:-
应用行业:制造业
技术简介
世界唯一类人智能机器人电脑能做的事情 机器人都能做 万能机器人可制造成变形金刚 ”晴天柱“工业机器人万能机器技术转让。进行机器人设计方案设计,提出主要技术参数,进行技术性可行性分析。进行机械构件设计,进行材料选取和强度计算。进行电气控制设计,确定控制方式和主要电气元件的品牌、规格型号等。进行工作图设计。若有相关的技术,请与本人联系。
机器人精度补偿技术与高精度智能机器人加工装备
成熟度:正在研发
技术类型:-
应用行业:制造业
技术简介
p 一、 成果简介机器人精度补偿技术与高精度机器人智能加工装备面向航空航天及高端民用产品数字 化智能制造领域,提供机器人加工装备整体解决方案设计、核心技术服务等研究性工作。重 点突破机器人高精度补偿、刚度增强、任务规划、智能末端执行器、集成控制的核心技术, 形成高精度机器人作业平台,通过装载制孔、铆接、铣削、测量等多功能末端执行器形成高 精度智能机器人加工装备。二、 创新点1.提出综合关节伺服控制和定位误差深度学习的机器人绝对定位精度补偿策略,实现机 器人的精确控制与实时补偿。2.提出基于在线感知的加工任务离线规划方法,实现钻铆工艺离线任务的智能规划。3.提出融合视觉、触觉、听觉和主轴功率感知的智能钻铆一体化多功能末端执行器模块 化结构,实现钻铆状态实时动态感知与钻铆质量在线监测。4.提出基于钻铆工艺学习样本库的深度置信网络学习策略,形成基于钻铆工艺深度学习 的自适应控制方法。 img title="e:\k8008\qiuchengcai\桌面\成果图片\南航成果图片\领域\图片47.png" alt="e:\k8008\qiuchengcai\桌面\成果图片\南航成果图片\领域\图片47.png" src="https://ue-upload.1633.com/2020/0429/1601410805892.png"/ img title="e:\k8008\qiuchengcai\桌面\成果图片\南航成果图片\领域\图片48.png" alt="e:\k8008\qiuchengcai\桌面\成果图片\南航成果图片\领域\图片48.png" src="https://ue-upload.1633.com/2020/0429/1601366579532.png"/ /p
找到30项技术成果数据。
找技术 >智能机器人吸尘器全套自动控制解决方案寻求合作
成熟度:正在研发
技术类型:-
应用行业:制造业
技术简介
慈溪傲行智能技术有限公司是一家专业从事智能化控制系统研发的科技型企业。 公司依靠强大的技术实力和研发能力,为制造型企业提供高新技术产品,关键控制技术解决方案和技术升级服务。 傲行智能不断追求技术领先、产品卓越,以科技创新促进劳动密集型企业实现企业转型,产业升级尽绵薄之力。 项目: 智能机器人吸尘器 经过近一年的攻关研发,现已完成智能机器人的智能控制系统的工作 本控制系统包括以下关键技术: 1 路径规划技术 路径规划就是根据机器人所感知到的工作环境信息, 按照某种优化指标, 在起始点和目标点规划出一条与环境障碍无碰撞的路径, 并且实现所需清扫区域的合理完全路径覆盖,其实质就是移动机器人运动过程中的导航和避碰。 2 多传感器融合技术 为了让吸尘机器人正常工作, 必须对机器人位置、姿态、速度和系统内部状态进行监控, 还要感知机器人所处工作环境的静态和动态信息, 使得吸尘机器人相应的工作顺序和操作内容能自然地适应工作环境的变化。 吸尘机器人都采用了大量的传感器, 有效地把大量的传感器观测信息进行融合处理, 从而使机器人获得最大量的外部环境信息, 运用多传感器融合技术对提高移动机器人定位、障碍物识别、环境建模、避障的精度等具有重要作用。 3电源技术 移动电源需同时为移动机构提供动力,为控制电路提供稳定的电压,为吸尘操作模块及传感观测模块提供能源等。电源在放电过程中具备: ①保持恒定的电压; ②内阻小以便快速放电; ③可充电; ④成本低等特点。 依托以上关键技术,可实现以下产品功能: 自动检测垃圾并对较脏的区域重点清扫 自动寻找智能充电座回去充电 定时清扫 当机器被卡住会自动摆脱 支持遥控。 虚拟墙感应 边角清扫程序。 不重复清洁、不留死角和楼梯防摔自保功能 以所掌握的关键技术为基础,可扩展研发智能移动监控机器人,智能草坪割草机器人,泳池清洗机器人等市场应用产品……………. 现寻项目合作方,方式面洽,望有志于进军民用机器人产业领域的企业或个人联系洽谈.
一种多功能随身助手智能机器人
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
摘要:本实用新型公开了一种多功能随身助手智能机器人,具体涉及智能机器人技术领域。该多功能随身助手智能机器人,包括球形的壳体,所述壳体内设有中央处理器、人机交互系统、电动马达、发电机构、蓄电池和控制电路板,壳体的顶部中心处设有万向节机翼转轴和飞行翼收纳槽,万向节机翼转轴上安装有可折叠飞行翼,壳体的中部设有围绕壳体一圈的遮挡部,遮挡部的下方设有对称设置的四个可折叠太阳能电池板,壳体的底部中心处设有可收缩底座和底座收纳槽,壳体上设有彩色触摸显示屏、识别启动按钮、红外测距传感器和多媒体机构,彩色触摸显示屏、识别启动按钮、红外测距传感器和多媒体机构均与中央处理器电控连接。
一种可用于交通指挥的智能机器人
成熟度:可规模生产
技术类型:-
应用行业:制造业
技术简介
项目简介:本技术属于机器人技术领域,尤其为一种可用于交通指挥的智能机器人,包括第一壳体,位于所述第一壳体上表面的第一连接块,所述第一连接块的上表面固定有第二壳体,所述第一壳体的前表面固定有显示屏,所述第二壳体的前表面沿竖直中线对称固定有高速摄像头;通过在第一壳体的外表壁一侧转动连接有第二连接块,同时在第二连接块的一侧固定有挡臂,同时在第一壳体的内部通过螺丝固定有第一伺服电机,并且第一伺服电机的输出轴的一端贯穿第一壳体与第二连接块固定连接,通过第一伺服电机带动第二连接块的转动从而可以带动挡臂进行转动,当人行红灯亮起的时候可以将挡臂转下从而可以对行人进行阻挡。 项目核心创新点:本技术一种折叠式工业设计展架,旨在解决现有的不能很好的对内部电子元件所产生的热量进行散出,同时当防尘网长时间的使用容易出现锈蚀从而对灰尘的防护性能下降的问题。 项目详细用途:本技术应用于交通指挥中。
复杂环境理解技术与地面智能机器人
成熟度:正在研发
技术类型:-
应用行业:制造业
技术简介
项目概况:地面智能机器人是一种能够在室内和室外环境下连续的,实时的自主运动的机器人。地面智能机器人可用于反恐行动、危险场所的救援行动等危及人类安全的危险作业领域。地面智能机器人关键技术还可用于汽车主动安全领域,例如,汽车主动防撞技术、车道保持技术、夜间辅助驾驶技术、提高恶劣气象条件下能见度的相关技术等,对于提高有人驾驶车辆的驾驶安全性和自动化水平都具有重要作用。技术指标:(1)具有昼夜无人驾驶能力;(3)能保持车道、安全跟随和超越前方车辆,能识别障碍物,并能避免与行人、自行车和路边树木、电线杆等物体碰撞;(4)可以在小雨、薄雾的环境下自主驾驶;(5)具有根据道路环境,自适应调整速度的能力。知识产权:发明专利项目水平:国内领先成熟程度:样机市场前景:地面智能机器人可用于反恐行动、危险场所的救援行动等危及人类安全的危险作业领域。其关键技术还可用于汽车主动安全技术领域,具有非常大的国内和国际市场。合作方式:合作开发、专利许可、技术转让、技术入股
自主移动式智能机器人
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
摘要:一种自主移动式智能机器人,设置有移动主体、通过电机驱动的转轮、电源管理模块、一组以上的超声波测距模块、电机控制模块和主控模块;所述转轮装配于所述移动主体,所述电源管理模块、超声波测距模块、电机控制模块和所述主控模块设置于所述移动主体,所述电源管理模块分别与所述超声波测距模块、主控模块电连接,所述超声波测距模块与所述主控模块连接,所述主控模块与所述电机控制模块连接,所述电机控制模块与所述电机连接;还设置有红外追踪模块,所述红外追踪模块与所述主控模块电连接。该自主移动式智能机器人具有成本低廉、数据处理简单、反应迅速的特点。
危害气体智能安全监控网络化系统
成熟度:通过中试
技术类型:-
应用行业:制造业,交通运输、仓储和邮政业
技术简介
一、内容简介已有专利技术,有待完善的系统样机等,系统由多个固定传感器监测节点、主动嗅觉巡检智能机器人以及空中无,人机组成三维立体的基于物联网架构的无线传感器网络监控系统。为实现快速、准确、可靠地定位危险气体泄漏源,通过“发现-追踪-定位”三个环节和“固定监测-地面移动追踪-空中可视搜寻”三种方式解决问题。二、技术特点及主要技术指标系统由多个固定监测节点、主动嗅觉巡检智能机器人以及空中无人机组成三维立体的基于物联网架构的无线传感器网络监控系统;气味罗盘装置可以根据风速、风向以及泄露气体浓度梯度数据判别气体泄漏源的方位;智能机器入自主搜寻气体泄漏轨迹及定位泄漏源算法;基于物联网架构的危险气体无线传感器网络监控平台。供电方式外接电源( 200~240V AC )。输入额定电流: 130mA。额定功率: 3.50W。响应时间:≤30s。检测对象:有毒有害气体,温度,湿度。测量范围:气体浓度0~20ppm;温度-20.0C~ 70.0C; 湿度10%RH~90%RH;对应输出电压:DC0.60~3.00V。精度: 5%(正常大条件下,出厂标定)。三、预期经济效益预计用于煤炭、石油、化工油气运输、能源生产、交通运输航空航天等行业有着极大的市场需求。
一种米粒形象的智能机器人服务员
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
本实用新型公开了一种米粒形象的智能机器人服务员。 该智能机器人服务员包括头部,身体;所述头部设于身体的上端;所述头部内部设有无线信号接收发射器;所述身体包括上半身和下半身;所述上半身的两侧均设有手臂;在两手臂之间设有餐盘支架;在下半身设有运动装置。该智能机器人服务员,在实现服务的同时,以智能现代化的方式提高效率,节约劳动力,吸引消费者。
一种用于牙齿开髓牙体预备的智能机器人
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
本发明公开了一种用于牙齿开髓牙体预备的智能机器人。 智能机器人包括卡槽、X轴运动载板、钻头角度微调口、Y轴运动杆、钻头角度微调杆、Z轴运动杆、控制驱动机构、冲洗回吸机构、钻头;控制驱动机构固定安装在所述的Z轴运动杆上,分别与X轴运动载板驱动机构、Y轴运动杆驱动机构、Z轴运动杆驱动机构、钻头角度微调杆驱动机构、冲洗回吸机构、钻头连接,用于接收外部计算机的控制信息,控制所述的X轴运动载板、Y轴运动杆、Z轴运动杆、钻头角度微调杆、冲洗回吸机构、钻头工作。本智能机器人可以基于对数字化牙齿解剖结构数据的分析,精确驱动钻头对目标牙齿的牙体进行预备成形和髓腔打开。
智能机器人世界唯一类人智能机器人
成熟度:通过小试
技术类型:-
应用行业:制造业
技术简介
世界唯一类人智能机器人电脑能做的事情 机器人都能做 万能机器人可制造成变形金刚 ”晴天柱“工业机器人万能机器技术转让。进行机器人设计方案设计,提出主要技术参数,进行技术性可行性分析。进行机械构件设计,进行材料选取和强度计算。进行电气控制设计,确定控制方式和主要电气元件的品牌、规格型号等。进行工作图设计。若有相关的技术,请与本人联系。
机器人精度补偿技术与高精度智能机器人加工装备
成熟度:正在研发
技术类型:-
应用行业:制造业
技术简介
p 一、 成果简介机器人精度补偿技术与高精度机器人智能加工装备面向航空航天及高端民用产品数字 化智能制造领域,提供机器人加工装备整体解决方案设计、核心技术服务等研究性工作。重 点突破机器人高精度补偿、刚度增强、任务规划、智能末端执行器、集成控制的核心技术, 形成高精度机器人作业平台,通过装载制孔、铆接、铣削、测量等多功能末端执行器形成高 精度智能机器人加工装备。二、 创新点1.提出综合关节伺服控制和定位误差深度学习的机器人绝对定位精度补偿策略,实现机 器人的精确控制与实时补偿。2.提出基于在线感知的加工任务离线规划方法,实现钻铆工艺离线任务的智能规划。3.提出融合视觉、触觉、听觉和主轴功率感知的智能钻铆一体化多功能末端执行器模块 化结构,实现钻铆状态实时动态感知与钻铆质量在线监测。4.提出基于钻铆工艺学习样本库的深度置信网络学习策略,形成基于钻铆工艺深度学习 的自适应控制方法。 img title="e:\k8008\qiuchengcai\桌面\成果图片\南航成果图片\领域\图片47.png" alt="e:\k8008\qiuchengcai\桌面\成果图片\南航成果图片\领域\图片47.png" src="https://ue-upload.1633.com/2020/0429/1601410805892.png"/ img title="e:\k8008\qiuchengcai\桌面\成果图片\南航成果图片\领域\图片48.png" alt="e:\k8008\qiuchengcai\桌面\成果图片\南航成果图片\领域\图片48.png" src="https://ue-upload.1633.com/2020/0429/1601366579532.png"/ /p
找到30项技术成果数据。
找技术 >智能机器人吸尘器全套自动控制解决方案寻求合作
成熟度:正在研发
技术类型:-
应用行业:制造业
技术简介
慈溪傲行智能技术有限公司是一家专业从事智能化控制系统研发的科技型企业。 公司依靠强大的技术实力和研发能力,为制造型企业提供高新技术产品,关键控制技术解决方案和技术升级服务。 傲行智能不断追求技术领先、产品卓越,以科技创新促进劳动密集型企业实现企业转型,产业升级尽绵薄之力。 项目: 智能机器人吸尘器 经过近一年的攻关研发,现已完成智能机器人的智能控制系统的工作 本控制系统包括以下关键技术: 1 路径规划技术 路径规划就是根据机器人所感知到的工作环境信息, 按照某种优化指标, 在起始点和目标点规划出一条与环境障碍无碰撞的路径, 并且实现所需清扫区域的合理完全路径覆盖,其实质就是移动机器人运动过程中的导航和避碰。 2 多传感器融合技术 为了让吸尘机器人正常工作, 必须对机器人位置、姿态、速度和系统内部状态进行监控, 还要感知机器人所处工作环境的静态和动态信息, 使得吸尘机器人相应的工作顺序和操作内容能自然地适应工作环境的变化。 吸尘机器人都采用了大量的传感器, 有效地把大量的传感器观测信息进行融合处理, 从而使机器人获得最大量的外部环境信息, 运用多传感器融合技术对提高移动机器人定位、障碍物识别、环境建模、避障的精度等具有重要作用。 3电源技术 移动电源需同时为移动机构提供动力,为控制电路提供稳定的电压,为吸尘操作模块及传感观测模块提供能源等。电源在放电过程中具备: ①保持恒定的电压; ②内阻小以便快速放电; ③可充电; ④成本低等特点。 依托以上关键技术,可实现以下产品功能: 自动检测垃圾并对较脏的区域重点清扫 自动寻找智能充电座回去充电 定时清扫 当机器被卡住会自动摆脱 支持遥控。 虚拟墙感应 边角清扫程序。 不重复清洁、不留死角和楼梯防摔自保功能 以所掌握的关键技术为基础,可扩展研发智能移动监控机器人,智能草坪割草机器人,泳池清洗机器人等市场应用产品……………. 现寻项目合作方,方式面洽,望有志于进军民用机器人产业领域的企业或个人联系洽谈.
一种多功能随身助手智能机器人
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
摘要:本实用新型公开了一种多功能随身助手智能机器人,具体涉及智能机器人技术领域。该多功能随身助手智能机器人,包括球形的壳体,所述壳体内设有中央处理器、人机交互系统、电动马达、发电机构、蓄电池和控制电路板,壳体的顶部中心处设有万向节机翼转轴和飞行翼收纳槽,万向节机翼转轴上安装有可折叠飞行翼,壳体的中部设有围绕壳体一圈的遮挡部,遮挡部的下方设有对称设置的四个可折叠太阳能电池板,壳体的底部中心处设有可收缩底座和底座收纳槽,壳体上设有彩色触摸显示屏、识别启动按钮、红外测距传感器和多媒体机构,彩色触摸显示屏、识别启动按钮、红外测距传感器和多媒体机构均与中央处理器电控连接。
一种可用于交通指挥的智能机器人
成熟度:可规模生产
技术类型:-
应用行业:制造业
技术简介
项目简介:本技术属于机器人技术领域,尤其为一种可用于交通指挥的智能机器人,包括第一壳体,位于所述第一壳体上表面的第一连接块,所述第一连接块的上表面固定有第二壳体,所述第一壳体的前表面固定有显示屏,所述第二壳体的前表面沿竖直中线对称固定有高速摄像头;通过在第一壳体的外表壁一侧转动连接有第二连接块,同时在第二连接块的一侧固定有挡臂,同时在第一壳体的内部通过螺丝固定有第一伺服电机,并且第一伺服电机的输出轴的一端贯穿第一壳体与第二连接块固定连接,通过第一伺服电机带动第二连接块的转动从而可以带动挡臂进行转动,当人行红灯亮起的时候可以将挡臂转下从而可以对行人进行阻挡。 项目核心创新点:本技术一种折叠式工业设计展架,旨在解决现有的不能很好的对内部电子元件所产生的热量进行散出,同时当防尘网长时间的使用容易出现锈蚀从而对灰尘的防护性能下降的问题。 项目详细用途:本技术应用于交通指挥中。
复杂环境理解技术与地面智能机器人
成熟度:正在研发
技术类型:-
应用行业:制造业
技术简介
项目概况:地面智能机器人是一种能够在室内和室外环境下连续的,实时的自主运动的机器人。地面智能机器人可用于反恐行动、危险场所的救援行动等危及人类安全的危险作业领域。地面智能机器人关键技术还可用于汽车主动安全领域,例如,汽车主动防撞技术、车道保持技术、夜间辅助驾驶技术、提高恶劣气象条件下能见度的相关技术等,对于提高有人驾驶车辆的驾驶安全性和自动化水平都具有重要作用。技术指标:(1)具有昼夜无人驾驶能力;(3)能保持车道、安全跟随和超越前方车辆,能识别障碍物,并能避免与行人、自行车和路边树木、电线杆等物体碰撞;(4)可以在小雨、薄雾的环境下自主驾驶;(5)具有根据道路环境,自适应调整速度的能力。知识产权:发明专利项目水平:国内领先成熟程度:样机市场前景:地面智能机器人可用于反恐行动、危险场所的救援行动等危及人类安全的危险作业领域。其关键技术还可用于汽车主动安全技术领域,具有非常大的国内和国际市场。合作方式:合作开发、专利许可、技术转让、技术入股
自主移动式智能机器人
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
摘要:一种自主移动式智能机器人,设置有移动主体、通过电机驱动的转轮、电源管理模块、一组以上的超声波测距模块、电机控制模块和主控模块;所述转轮装配于所述移动主体,所述电源管理模块、超声波测距模块、电机控制模块和所述主控模块设置于所述移动主体,所述电源管理模块分别与所述超声波测距模块、主控模块电连接,所述超声波测距模块与所述主控模块连接,所述主控模块与所述电机控制模块连接,所述电机控制模块与所述电机连接;还设置有红外追踪模块,所述红外追踪模块与所述主控模块电连接。该自主移动式智能机器人具有成本低廉、数据处理简单、反应迅速的特点。
危害气体智能安全监控网络化系统
成熟度:通过中试
技术类型:-
应用行业:制造业,交通运输、仓储和邮政业
技术简介
一、内容简介已有专利技术,有待完善的系统样机等,系统由多个固定传感器监测节点、主动嗅觉巡检智能机器人以及空中无,人机组成三维立体的基于物联网架构的无线传感器网络监控系统。为实现快速、准确、可靠地定位危险气体泄漏源,通过“发现-追踪-定位”三个环节和“固定监测-地面移动追踪-空中可视搜寻”三种方式解决问题。二、技术特点及主要技术指标系统由多个固定监测节点、主动嗅觉巡检智能机器人以及空中无人机组成三维立体的基于物联网架构的无线传感器网络监控系统;气味罗盘装置可以根据风速、风向以及泄露气体浓度梯度数据判别气体泄漏源的方位;智能机器入自主搜寻气体泄漏轨迹及定位泄漏源算法;基于物联网架构的危险气体无线传感器网络监控平台。供电方式外接电源( 200~240V AC )。输入额定电流: 130mA。额定功率: 3.50W。响应时间:≤30s。检测对象:有毒有害气体,温度,湿度。测量范围:气体浓度0~20ppm;温度-20.0C~ 70.0C; 湿度10%RH~90%RH;对应输出电压:DC0.60~3.00V。精度: 5%(正常大条件下,出厂标定)。三、预期经济效益预计用于煤炭、石油、化工油气运输、能源生产、交通运输航空航天等行业有着极大的市场需求。
一种米粒形象的智能机器人服务员
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
本实用新型公开了一种米粒形象的智能机器人服务员。 该智能机器人服务员包括头部,身体;所述头部设于身体的上端;所述头部内部设有无线信号接收发射器;所述身体包括上半身和下半身;所述上半身的两侧均设有手臂;在两手臂之间设有餐盘支架;在下半身设有运动装置。该智能机器人服务员,在实现服务的同时,以智能现代化的方式提高效率,节约劳动力,吸引消费者。
一种用于牙齿开髓牙体预备的智能机器人
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
本发明公开了一种用于牙齿开髓牙体预备的智能机器人。 智能机器人包括卡槽、X轴运动载板、钻头角度微调口、Y轴运动杆、钻头角度微调杆、Z轴运动杆、控制驱动机构、冲洗回吸机构、钻头;控制驱动机构固定安装在所述的Z轴运动杆上,分别与X轴运动载板驱动机构、Y轴运动杆驱动机构、Z轴运动杆驱动机构、钻头角度微调杆驱动机构、冲洗回吸机构、钻头连接,用于接收外部计算机的控制信息,控制所述的X轴运动载板、Y轴运动杆、Z轴运动杆、钻头角度微调杆、冲洗回吸机构、钻头工作。本智能机器人可以基于对数字化牙齿解剖结构数据的分析,精确驱动钻头对目标牙齿的牙体进行预备成形和髓腔打开。
智能机器人世界唯一类人智能机器人
成熟度:通过小试
技术类型:-
应用行业:制造业
技术简介
世界唯一类人智能机器人电脑能做的事情 机器人都能做 万能机器人可制造成变形金刚 ”晴天柱“工业机器人万能机器技术转让。进行机器人设计方案设计,提出主要技术参数,进行技术性可行性分析。进行机械构件设计,进行材料选取和强度计算。进行电气控制设计,确定控制方式和主要电气元件的品牌、规格型号等。进行工作图设计。若有相关的技术,请与本人联系。
机器人精度补偿技术与高精度智能机器人加工装备
成熟度:正在研发
技术类型:-
应用行业:制造业
技术简介
p 一、 成果简介机器人精度补偿技术与高精度机器人智能加工装备面向航空航天及高端民用产品数字 化智能制造领域,提供机器人加工装备整体解决方案设计、核心技术服务等研究性工作。重 点突破机器人高精度补偿、刚度增强、任务规划、智能末端执行器、集成控制的核心技术, 形成高精度机器人作业平台,通过装载制孔、铆接、铣削、测量等多功能末端执行器形成高 精度智能机器人加工装备。二、 创新点1.提出综合关节伺服控制和定位误差深度学习的机器人绝对定位精度补偿策略,实现机 器人的精确控制与实时补偿。2.提出基于在线感知的加工任务离线规划方法,实现钻铆工艺离线任务的智能规划。3.提出融合视觉、触觉、听觉和主轴功率感知的智能钻铆一体化多功能末端执行器模块 化结构,实现钻铆状态实时动态感知与钻铆质量在线监测。4.提出基于钻铆工艺学习样本库的深度置信网络学习策略,形成基于钻铆工艺深度学习 的自适应控制方法。 img title="e:\k8008\qiuchengcai\桌面\成果图片\南航成果图片\领域\图片47.png" alt="e:\k8008\qiuchengcai\桌面\成果图片\南航成果图片\领域\图片47.png" src="https://ue-upload.1633.com/2020/0429/1601410805892.png"/ img title="e:\k8008\qiuchengcai\桌面\成果图片\南航成果图片\领域\图片48.png" alt="e:\k8008\qiuchengcai\桌面\成果图片\南航成果图片\领域\图片48.png" src="https://ue-upload.1633.com/2020/0429/1601366579532.png"/ /p
找到30项技术成果数据。
找技术 >智能机器人吸尘器全套自动控制解决方案寻求合作
成熟度:正在研发
技术类型:-
应用行业:制造业
技术简介
慈溪傲行智能技术有限公司是一家专业从事智能化控制系统研发的科技型企业。 公司依靠强大的技术实力和研发能力,为制造型企业提供高新技术产品,关键控制技术解决方案和技术升级服务。 傲行智能不断追求技术领先、产品卓越,以科技创新促进劳动密集型企业实现企业转型,产业升级尽绵薄之力。 项目: 智能机器人吸尘器 经过近一年的攻关研发,现已完成智能机器人的智能控制系统的工作 本控制系统包括以下关键技术: 1 路径规划技术 路径规划就是根据机器人所感知到的工作环境信息, 按照某种优化指标, 在起始点和目标点规划出一条与环境障碍无碰撞的路径, 并且实现所需清扫区域的合理完全路径覆盖,其实质就是移动机器人运动过程中的导航和避碰。 2 多传感器融合技术 为了让吸尘机器人正常工作, 必须对机器人位置、姿态、速度和系统内部状态进行监控, 还要感知机器人所处工作环境的静态和动态信息, 使得吸尘机器人相应的工作顺序和操作内容能自然地适应工作环境的变化。 吸尘机器人都采用了大量的传感器, 有效地把大量的传感器观测信息进行融合处理, 从而使机器人获得最大量的外部环境信息, 运用多传感器融合技术对提高移动机器人定位、障碍物识别、环境建模、避障的精度等具有重要作用。 3电源技术 移动电源需同时为移动机构提供动力,为控制电路提供稳定的电压,为吸尘操作模块及传感观测模块提供能源等。电源在放电过程中具备: ①保持恒定的电压; ②内阻小以便快速放电; ③可充电; ④成本低等特点。 依托以上关键技术,可实现以下产品功能: 自动检测垃圾并对较脏的区域重点清扫 自动寻找智能充电座回去充电 定时清扫 当机器被卡住会自动摆脱 支持遥控。 虚拟墙感应 边角清扫程序。 不重复清洁、不留死角和楼梯防摔自保功能 以所掌握的关键技术为基础,可扩展研发智能移动监控机器人,智能草坪割草机器人,泳池清洗机器人等市场应用产品……………. 现寻项目合作方,方式面洽,望有志于进军民用机器人产业领域的企业或个人联系洽谈.
一种多功能随身助手智能机器人
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
摘要:本实用新型公开了一种多功能随身助手智能机器人,具体涉及智能机器人技术领域。该多功能随身助手智能机器人,包括球形的壳体,所述壳体内设有中央处理器、人机交互系统、电动马达、发电机构、蓄电池和控制电路板,壳体的顶部中心处设有万向节机翼转轴和飞行翼收纳槽,万向节机翼转轴上安装有可折叠飞行翼,壳体的中部设有围绕壳体一圈的遮挡部,遮挡部的下方设有对称设置的四个可折叠太阳能电池板,壳体的底部中心处设有可收缩底座和底座收纳槽,壳体上设有彩色触摸显示屏、识别启动按钮、红外测距传感器和多媒体机构,彩色触摸显示屏、识别启动按钮、红外测距传感器和多媒体机构均与中央处理器电控连接。
一种可用于交通指挥的智能机器人
成熟度:可规模生产
技术类型:-
应用行业:制造业
技术简介
项目简介:本技术属于机器人技术领域,尤其为一种可用于交通指挥的智能机器人,包括第一壳体,位于所述第一壳体上表面的第一连接块,所述第一连接块的上表面固定有第二壳体,所述第一壳体的前表面固定有显示屏,所述第二壳体的前表面沿竖直中线对称固定有高速摄像头;通过在第一壳体的外表壁一侧转动连接有第二连接块,同时在第二连接块的一侧固定有挡臂,同时在第一壳体的内部通过螺丝固定有第一伺服电机,并且第一伺服电机的输出轴的一端贯穿第一壳体与第二连接块固定连接,通过第一伺服电机带动第二连接块的转动从而可以带动挡臂进行转动,当人行红灯亮起的时候可以将挡臂转下从而可以对行人进行阻挡。 项目核心创新点:本技术一种折叠式工业设计展架,旨在解决现有的不能很好的对内部电子元件所产生的热量进行散出,同时当防尘网长时间的使用容易出现锈蚀从而对灰尘的防护性能下降的问题。 项目详细用途:本技术应用于交通指挥中。
复杂环境理解技术与地面智能机器人
成熟度:正在研发
技术类型:-
应用行业:制造业
技术简介
项目概况:地面智能机器人是一种能够在室内和室外环境下连续的,实时的自主运动的机器人。地面智能机器人可用于反恐行动、危险场所的救援行动等危及人类安全的危险作业领域。地面智能机器人关键技术还可用于汽车主动安全领域,例如,汽车主动防撞技术、车道保持技术、夜间辅助驾驶技术、提高恶劣气象条件下能见度的相关技术等,对于提高有人驾驶车辆的驾驶安全性和自动化水平都具有重要作用。技术指标:(1)具有昼夜无人驾驶能力;(3)能保持车道、安全跟随和超越前方车辆,能识别障碍物,并能避免与行人、自行车和路边树木、电线杆等物体碰撞;(4)可以在小雨、薄雾的环境下自主驾驶;(5)具有根据道路环境,自适应调整速度的能力。知识产权:发明专利项目水平:国内领先成熟程度:样机市场前景:地面智能机器人可用于反恐行动、危险场所的救援行动等危及人类安全的危险作业领域。其关键技术还可用于汽车主动安全技术领域,具有非常大的国内和国际市场。合作方式:合作开发、专利许可、技术转让、技术入股
自主移动式智能机器人
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
摘要:一种自主移动式智能机器人,设置有移动主体、通过电机驱动的转轮、电源管理模块、一组以上的超声波测距模块、电机控制模块和主控模块;所述转轮装配于所述移动主体,所述电源管理模块、超声波测距模块、电机控制模块和所述主控模块设置于所述移动主体,所述电源管理模块分别与所述超声波测距模块、主控模块电连接,所述超声波测距模块与所述主控模块连接,所述主控模块与所述电机控制模块连接,所述电机控制模块与所述电机连接;还设置有红外追踪模块,所述红外追踪模块与所述主控模块电连接。该自主移动式智能机器人具有成本低廉、数据处理简单、反应迅速的特点。
危害气体智能安全监控网络化系统
成熟度:通过中试
技术类型:-
应用行业:制造业,交通运输、仓储和邮政业
技术简介
一、内容简介已有专利技术,有待完善的系统样机等,系统由多个固定传感器监测节点、主动嗅觉巡检智能机器人以及空中无,人机组成三维立体的基于物联网架构的无线传感器网络监控系统。为实现快速、准确、可靠地定位危险气体泄漏源,通过“发现-追踪-定位”三个环节和“固定监测-地面移动追踪-空中可视搜寻”三种方式解决问题。二、技术特点及主要技术指标系统由多个固定监测节点、主动嗅觉巡检智能机器人以及空中无人机组成三维立体的基于物联网架构的无线传感器网络监控系统;气味罗盘装置可以根据风速、风向以及泄露气体浓度梯度数据判别气体泄漏源的方位;智能机器入自主搜寻气体泄漏轨迹及定位泄漏源算法;基于物联网架构的危险气体无线传感器网络监控平台。供电方式外接电源( 200~240V AC )。输入额定电流: 130mA。额定功率: 3.50W。响应时间:≤30s。检测对象:有毒有害气体,温度,湿度。测量范围:气体浓度0~20ppm;温度-20.0C~ 70.0C; 湿度10%RH~90%RH;对应输出电压:DC0.60~3.00V。精度: 5%(正常大条件下,出厂标定)。三、预期经济效益预计用于煤炭、石油、化工油气运输、能源生产、交通运输航空航天等行业有着极大的市场需求。
一种米粒形象的智能机器人服务员
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
本实用新型公开了一种米粒形象的智能机器人服务员。 该智能机器人服务员包括头部,身体;所述头部设于身体的上端;所述头部内部设有无线信号接收发射器;所述身体包括上半身和下半身;所述上半身的两侧均设有手臂;在两手臂之间设有餐盘支架;在下半身设有运动装置。该智能机器人服务员,在实现服务的同时,以智能现代化的方式提高效率,节约劳动力,吸引消费者。
一种用于牙齿开髓牙体预备的智能机器人
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
本发明公开了一种用于牙齿开髓牙体预备的智能机器人。 智能机器人包括卡槽、X轴运动载板、钻头角度微调口、Y轴运动杆、钻头角度微调杆、Z轴运动杆、控制驱动机构、冲洗回吸机构、钻头;控制驱动机构固定安装在所述的Z轴运动杆上,分别与X轴运动载板驱动机构、Y轴运动杆驱动机构、Z轴运动杆驱动机构、钻头角度微调杆驱动机构、冲洗回吸机构、钻头连接,用于接收外部计算机的控制信息,控制所述的X轴运动载板、Y轴运动杆、Z轴运动杆、钻头角度微调杆、冲洗回吸机构、钻头工作。本智能机器人可以基于对数字化牙齿解剖结构数据的分析,精确驱动钻头对目标牙齿的牙体进行预备成形和髓腔打开。
智能机器人世界唯一类人智能机器人
成熟度:通过小试
技术类型:-
应用行业:制造业
技术简介
世界唯一类人智能机器人电脑能做的事情 机器人都能做 万能机器人可制造成变形金刚 ”晴天柱“工业机器人万能机器技术转让。进行机器人设计方案设计,提出主要技术参数,进行技术性可行性分析。进行机械构件设计,进行材料选取和强度计算。进行电气控制设计,确定控制方式和主要电气元件的品牌、规格型号等。进行工作图设计。若有相关的技术,请与本人联系。
机器人精度补偿技术与高精度智能机器人加工装备
成熟度:正在研发
技术类型:-
应用行业:制造业
技术简介
p 一、 成果简介机器人精度补偿技术与高精度机器人智能加工装备面向航空航天及高端民用产品数字 化智能制造领域,提供机器人加工装备整体解决方案设计、核心技术服务等研究性工作。重 点突破机器人高精度补偿、刚度增强、任务规划、智能末端执行器、集成控制的核心技术, 形成高精度机器人作业平台,通过装载制孔、铆接、铣削、测量等多功能末端执行器形成高 精度智能机器人加工装备。二、 创新点1.提出综合关节伺服控制和定位误差深度学习的机器人绝对定位精度补偿策略,实现机 器人的精确控制与实时补偿。2.提出基于在线感知的加工任务离线规划方法,实现钻铆工艺离线任务的智能规划。3.提出融合视觉、触觉、听觉和主轴功率感知的智能钻铆一体化多功能末端执行器模块 化结构,实现钻铆状态实时动态感知与钻铆质量在线监测。4.提出基于钻铆工艺学习样本库的深度置信网络学习策略,形成基于钻铆工艺深度学习 的自适应控制方法。 img title="e:\k8008\qiuchengcai\桌面\成果图片\南航成果图片\领域\图片47.png" alt="e:\k8008\qiuchengcai\桌面\成果图片\南航成果图片\领域\图片47.png" src="https://ue-upload.1633.com/2020/0429/1601410805892.png"/ img title="e:\k8008\qiuchengcai\桌面\成果图片\南航成果图片\领域\图片48.png" alt="e:\k8008\qiuchengcai\桌面\成果图片\南航成果图片\领域\图片48.png" src="https://ue-upload.1633.com/2020/0429/1601366579532.png"/ /p
找到30项技术成果数据。
找技术 >智能机器人吸尘器全套自动控制解决方案寻求合作
成熟度:正在研发
技术类型:-
应用行业:制造业
技术简介
慈溪傲行智能技术有限公司是一家专业从事智能化控制系统研发的科技型企业。 公司依靠强大的技术实力和研发能力,为制造型企业提供高新技术产品,关键控制技术解决方案和技术升级服务。 傲行智能不断追求技术领先、产品卓越,以科技创新促进劳动密集型企业实现企业转型,产业升级尽绵薄之力。 项目: 智能机器人吸尘器 经过近一年的攻关研发,现已完成智能机器人的智能控制系统的工作 本控制系统包括以下关键技术: 1 路径规划技术 路径规划就是根据机器人所感知到的工作环境信息, 按照某种优化指标, 在起始点和目标点规划出一条与环境障碍无碰撞的路径, 并且实现所需清扫区域的合理完全路径覆盖,其实质就是移动机器人运动过程中的导航和避碰。 2 多传感器融合技术 为了让吸尘机器人正常工作, 必须对机器人位置、姿态、速度和系统内部状态进行监控, 还要感知机器人所处工作环境的静态和动态信息, 使得吸尘机器人相应的工作顺序和操作内容能自然地适应工作环境的变化。 吸尘机器人都采用了大量的传感器, 有效地把大量的传感器观测信息进行融合处理, 从而使机器人获得最大量的外部环境信息, 运用多传感器融合技术对提高移动机器人定位、障碍物识别、环境建模、避障的精度等具有重要作用。 3电源技术 移动电源需同时为移动机构提供动力,为控制电路提供稳定的电压,为吸尘操作模块及传感观测模块提供能源等。电源在放电过程中具备: ①保持恒定的电压; ②内阻小以便快速放电; ③可充电; ④成本低等特点。 依托以上关键技术,可实现以下产品功能: 自动检测垃圾并对较脏的区域重点清扫 自动寻找智能充电座回去充电 定时清扫 当机器被卡住会自动摆脱 支持遥控。 虚拟墙感应 边角清扫程序。 不重复清洁、不留死角和楼梯防摔自保功能 以所掌握的关键技术为基础,可扩展研发智能移动监控机器人,智能草坪割草机器人,泳池清洗机器人等市场应用产品……………. 现寻项目合作方,方式面洽,望有志于进军民用机器人产业领域的企业或个人联系洽谈.
一种多功能随身助手智能机器人
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
摘要:本实用新型公开了一种多功能随身助手智能机器人,具体涉及智能机器人技术领域。该多功能随身助手智能机器人,包括球形的壳体,所述壳体内设有中央处理器、人机交互系统、电动马达、发电机构、蓄电池和控制电路板,壳体的顶部中心处设有万向节机翼转轴和飞行翼收纳槽,万向节机翼转轴上安装有可折叠飞行翼,壳体的中部设有围绕壳体一圈的遮挡部,遮挡部的下方设有对称设置的四个可折叠太阳能电池板,壳体的底部中心处设有可收缩底座和底座收纳槽,壳体上设有彩色触摸显示屏、识别启动按钮、红外测距传感器和多媒体机构,彩色触摸显示屏、识别启动按钮、红外测距传感器和多媒体机构均与中央处理器电控连接。
一种可用于交通指挥的智能机器人
成熟度:可规模生产
技术类型:-
应用行业:制造业
技术简介
项目简介:本技术属于机器人技术领域,尤其为一种可用于交通指挥的智能机器人,包括第一壳体,位于所述第一壳体上表面的第一连接块,所述第一连接块的上表面固定有第二壳体,所述第一壳体的前表面固定有显示屏,所述第二壳体的前表面沿竖直中线对称固定有高速摄像头;通过在第一壳体的外表壁一侧转动连接有第二连接块,同时在第二连接块的一侧固定有挡臂,同时在第一壳体的内部通过螺丝固定有第一伺服电机,并且第一伺服电机的输出轴的一端贯穿第一壳体与第二连接块固定连接,通过第一伺服电机带动第二连接块的转动从而可以带动挡臂进行转动,当人行红灯亮起的时候可以将挡臂转下从而可以对行人进行阻挡。 项目核心创新点:本技术一种折叠式工业设计展架,旨在解决现有的不能很好的对内部电子元件所产生的热量进行散出,同时当防尘网长时间的使用容易出现锈蚀从而对灰尘的防护性能下降的问题。 项目详细用途:本技术应用于交通指挥中。
复杂环境理解技术与地面智能机器人
成熟度:正在研发
技术类型:-
应用行业:制造业
技术简介
项目概况:地面智能机器人是一种能够在室内和室外环境下连续的,实时的自主运动的机器人。地面智能机器人可用于反恐行动、危险场所的救援行动等危及人类安全的危险作业领域。地面智能机器人关键技术还可用于汽车主动安全领域,例如,汽车主动防撞技术、车道保持技术、夜间辅助驾驶技术、提高恶劣气象条件下能见度的相关技术等,对于提高有人驾驶车辆的驾驶安全性和自动化水平都具有重要作用。技术指标:(1)具有昼夜无人驾驶能力;(3)能保持车道、安全跟随和超越前方车辆,能识别障碍物,并能避免与行人、自行车和路边树木、电线杆等物体碰撞;(4)可以在小雨、薄雾的环境下自主驾驶;(5)具有根据道路环境,自适应调整速度的能力。知识产权:发明专利项目水平:国内领先成熟程度:样机市场前景:地面智能机器人可用于反恐行动、危险场所的救援行动等危及人类安全的危险作业领域。其关键技术还可用于汽车主动安全技术领域,具有非常大的国内和国际市场。合作方式:合作开发、专利许可、技术转让、技术入股
自主移动式智能机器人
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
摘要:一种自主移动式智能机器人,设置有移动主体、通过电机驱动的转轮、电源管理模块、一组以上的超声波测距模块、电机控制模块和主控模块;所述转轮装配于所述移动主体,所述电源管理模块、超声波测距模块、电机控制模块和所述主控模块设置于所述移动主体,所述电源管理模块分别与所述超声波测距模块、主控模块电连接,所述超声波测距模块与所述主控模块连接,所述主控模块与所述电机控制模块连接,所述电机控制模块与所述电机连接;还设置有红外追踪模块,所述红外追踪模块与所述主控模块电连接。该自主移动式智能机器人具有成本低廉、数据处理简单、反应迅速的特点。
危害气体智能安全监控网络化系统
成熟度:通过中试
技术类型:-
应用行业:制造业,交通运输、仓储和邮政业
技术简介
一、内容简介已有专利技术,有待完善的系统样机等,系统由多个固定传感器监测节点、主动嗅觉巡检智能机器人以及空中无,人机组成三维立体的基于物联网架构的无线传感器网络监控系统。为实现快速、准确、可靠地定位危险气体泄漏源,通过“发现-追踪-定位”三个环节和“固定监测-地面移动追踪-空中可视搜寻”三种方式解决问题。二、技术特点及主要技术指标系统由多个固定监测节点、主动嗅觉巡检智能机器人以及空中无人机组成三维立体的基于物联网架构的无线传感器网络监控系统;气味罗盘装置可以根据风速、风向以及泄露气体浓度梯度数据判别气体泄漏源的方位;智能机器入自主搜寻气体泄漏轨迹及定位泄漏源算法;基于物联网架构的危险气体无线传感器网络监控平台。供电方式外接电源( 200~240V AC )。输入额定电流: 130mA。额定功率: 3.50W。响应时间:≤30s。检测对象:有毒有害气体,温度,湿度。测量范围:气体浓度0~20ppm;温度-20.0C~ 70.0C; 湿度10%RH~90%RH;对应输出电压:DC0.60~3.00V。精度: 5%(正常大条件下,出厂标定)。三、预期经济效益预计用于煤炭、石油、化工油气运输、能源生产、交通运输航空航天等行业有着极大的市场需求。
一种米粒形象的智能机器人服务员
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
本实用新型公开了一种米粒形象的智能机器人服务员。 该智能机器人服务员包括头部,身体;所述头部设于身体的上端;所述头部内部设有无线信号接收发射器;所述身体包括上半身和下半身;所述上半身的两侧均设有手臂;在两手臂之间设有餐盘支架;在下半身设有运动装置。该智能机器人服务员,在实现服务的同时,以智能现代化的方式提高效率,节约劳动力,吸引消费者。
一种用于牙齿开髓牙体预备的智能机器人
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
本发明公开了一种用于牙齿开髓牙体预备的智能机器人。 智能机器人包括卡槽、X轴运动载板、钻头角度微调口、Y轴运动杆、钻头角度微调杆、Z轴运动杆、控制驱动机构、冲洗回吸机构、钻头;控制驱动机构固定安装在所述的Z轴运动杆上,分别与X轴运动载板驱动机构、Y轴运动杆驱动机构、Z轴运动杆驱动机构、钻头角度微调杆驱动机构、冲洗回吸机构、钻头连接,用于接收外部计算机的控制信息,控制所述的X轴运动载板、Y轴运动杆、Z轴运动杆、钻头角度微调杆、冲洗回吸机构、钻头工作。本智能机器人可以基于对数字化牙齿解剖结构数据的分析,精确驱动钻头对目标牙齿的牙体进行预备成形和髓腔打开。
智能机器人世界唯一类人智能机器人
成熟度:通过小试
技术类型:-
应用行业:制造业
技术简介
世界唯一类人智能机器人电脑能做的事情 机器人都能做 万能机器人可制造成变形金刚 ”晴天柱“工业机器人万能机器技术转让。进行机器人设计方案设计,提出主要技术参数,进行技术性可行性分析。进行机械构件设计,进行材料选取和强度计算。进行电气控制设计,确定控制方式和主要电气元件的品牌、规格型号等。进行工作图设计。若有相关的技术,请与本人联系。
机器人精度补偿技术与高精度智能机器人加工装备
成熟度:正在研发
技术类型:-
应用行业:制造业
技术简介
p 一、 成果简介机器人精度补偿技术与高精度机器人智能加工装备面向航空航天及高端民用产品数字 化智能制造领域,提供机器人加工装备整体解决方案设计、核心技术服务等研究性工作。重 点突破机器人高精度补偿、刚度增强、任务规划、智能末端执行器、集成控制的核心技术, 形成高精度机器人作业平台,通过装载制孔、铆接、铣削、测量等多功能末端执行器形成高 精度智能机器人加工装备。二、 创新点1.提出综合关节伺服控制和定位误差深度学习的机器人绝对定位精度补偿策略,实现机 器人的精确控制与实时补偿。2.提出基于在线感知的加工任务离线规划方法,实现钻铆工艺离线任务的智能规划。3.提出融合视觉、触觉、听觉和主轴功率感知的智能钻铆一体化多功能末端执行器模块 化结构,实现钻铆状态实时动态感知与钻铆质量在线监测。4.提出基于钻铆工艺学习样本库的深度置信网络学习策略,形成基于钻铆工艺深度学习 的自适应控制方法。 img title="e:\k8008\qiuchengcai\桌面\成果图片\南航成果图片\领域\图片47.png" alt="e:\k8008\qiuchengcai\桌面\成果图片\南航成果图片\领域\图片47.png" src="https://ue-upload.1633.com/2020/0429/1601410805892.png"/ img title="e:\k8008\qiuchengcai\桌面\成果图片\南航成果图片\领域\图片48.png" alt="e:\k8008\qiuchengcai\桌面\成果图片\南航成果图片\领域\图片48.png" src="https://ue-upload.1633.com/2020/0429/1601366579532.png"/ /p