找到5项技术成果数据。
找技术 >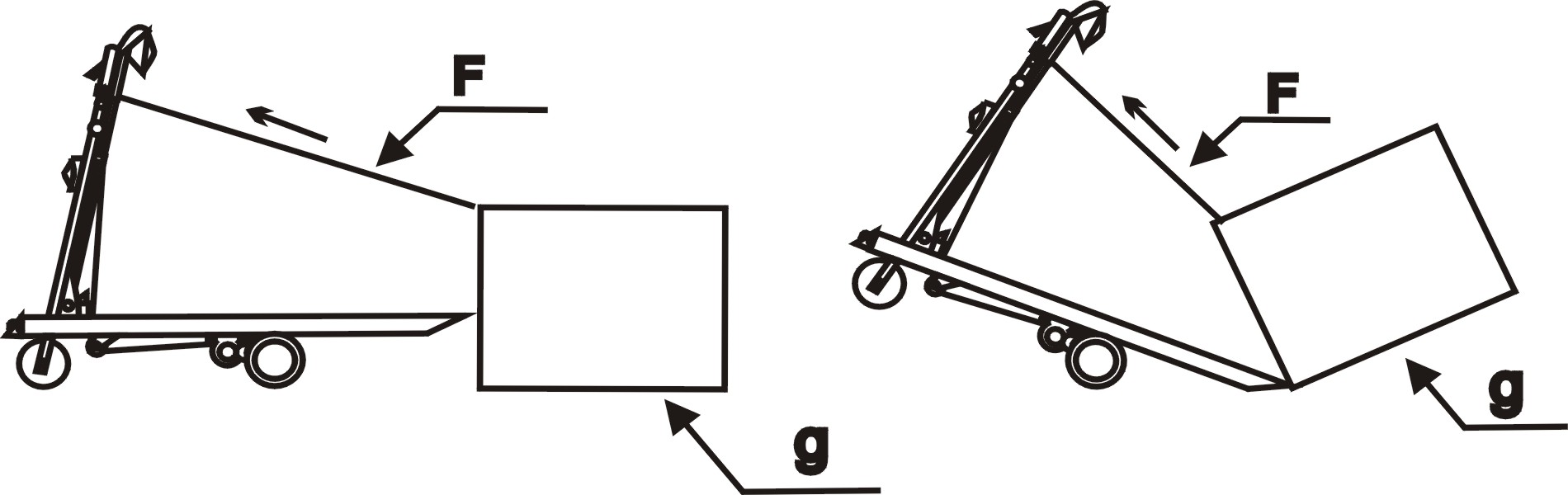
一种半自动装卸电动平板转运车
成熟度:通过小试
技术类型:实用新型
应用行业:交通运输、仓储和邮政业,制造业
技术简介
本专利技术涉及一种半自动装卸电动平板转运车 项目简介:一种半自动装卸电动平板转运车,一种用于商超、车间、大型库房的小件货物周转的半自动装卸运输工具。 项目核心创新点:本车具有半自动装在功能,比传统搬运车具有省力搬运的优势,加上前后切换的驾驶优点可最大限度的提高货物的周转效率。 项目详细用途:是一种用于商超、车间、大型库房的小件货物周转的半自动装载运输工具。 预期效益说明:因半自动装卸电动平板转运车车体采用传统材料制造无特殊难度,故成本不会很高,预期效益明显。

基于机器视觉的悬链线上零件自动装卸技术的研究
成熟度:-
技术类型:-
应用行业:制造业
技术简介
该成果基于机器视觉技术,用面阵/线阵相机进行工件和吊钩的图像采集、图像处理与自动识别,对工件和吊钩定位,采用机器人抓取和搬运工件,将工件悬挂在悬链线上,自动化程度高,搬运速度快。目前还没有发现研究这方面的内容,技术水平和自动化程度高,操作方便。成果创新性:(1)悬链线上工件和吊钩的自动识别技术,该成果基于机器视觉的工件自动识别技术,使用面阵/线阵相机采集吊钩和工件图像,对吊钩和工件图像进行处理和特征点识别研究,并进行了工件和吊钩特征点的位置定位,开发了适合悬链线上工件和吊钩自动识别技术软件。(2)研发悬链线上工件搬运夹持器,针对悬链线上悬挂工件的结构形状,研发了车轮搬运夹持器、直角三通阀门搬运夹持器、辊道输送定位装置、薄板吸附搬运夹持器等,可用于悬链线上圆柱体、长方体、薄板类等形状的工件抓放搬运,也可以用于制造和搬运工程中的工件抓取。(3)悬链线上工件的自动装卸技术,研究了悬链线上移动工件的自动装卸技术,进行了机器人运动轨迹规划,采用机器人与悬链线同步移动过程中装卸工件,避免了发生工件和吊钩的干涉和碰撞现象,实现了工件的自动装卸,开发了控制系统软件。成果独占性:该成果基于机器视觉技术,用面阵/线阵相机进行工件和吊钩的图像采集、图像处理与自动识别,对工件和吊钩定位,采用机器人抓取和搬运工件,将工件悬挂在悬链线上,自动化程度高,搬运速度快。目前还没有发现研究这方面的内容,技术水平和自动化程度高,操作方便。成果盈利性:目前悬链线上的生产过程已经了实现自动化,但工件的装卸仍然是手工搬运,导致整个生产线生产效率低,成本增加。采用该成果机器人自动装卸工件,整个生产线全部实现自动化,自动化水平提高,产量大幅度增大,生产成本下降,企业将会带较大利润,同时工件的产品性能质量得到较大提高。成果持续性:该成果基于机器视觉技术识别和定位工件、吊钩,采用工业机器人和滚珠丝杠移动工作台抓取、搬运工件,将工件悬挂到连续移动的悬链线上。机器视觉技术和工业机器人技术是目前机、电、计算机和控制等技术相结合,是目前最先进的科学技术,具有较高技术储备和持续创新能力。成果先进性:该成果在工件和吊钩自动识别和定位、工件搬运夹持器方面达到国际先进水平。机器人重复定位精度±0.15mm,装/卸时间达到5个/min,目前国内外还没有研发悬链线自动装卸设备,在悬链线涂装应用方面已经达到国际先进水平,在悬链抛丸、悬链线干燥和悬链线家禽屠宰等生产线上目前国内外还没有应用,预计很快将会得到广泛应用。

散粮自动装卸运输车
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
本实用新型属于粮食运输技术领域,特别涉及一种用于散粮自动装卸运输车。此车由汽车行驶器件和散粮自动装卸器件两部分组成,其特征是散粮自动装卸器件由封闭式装粮车厢、车厢升降部件、螺旋式出料绞笼、风机式吸料卸料部件、关风出料器五部分组成,封闭式装粮车厢固装在车架上,车厢升降部件设在封闭式装粮车厢下部,车厢升降部件使用中使封闭式装粮车厢向侧面抬升,而非向后抬升,螺旋式出料绞笼、风机式吸料卸料部件固装在封闭式装粮车厢内,关风出料器固装在螺旋式出料绞笼下部的风机式吸料卸料部件的管道上。优点是装卸料速度快,卸料不堵塞,车厢内的散粮卸出干净,卸粮后几乎无残余粮食,不浪费能源。

一种用于自动装卸定子的机器人末端执行器
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
本实用新型涉及一种用于自动装卸定子的机器人末端执行器,包括基座、抓取机构、吸附检测机构,抓取机构和吸附检测机构与基座固定连接;抓取机构包括导向推动气缸、定位圆盘、气爪、延长块,导向推动气缸固定在基座上,导向推动气缸输出端与定位圆盘连接,气爪一端与基座固定连接,另一端与延长块连接;吸附检测机构包括工业相机、真空吸盘、吸盘架,吸盘架与基座固定连接,真空吸盘、工业相机固定在吸盘架上。优点是:结构合理简单,装调方便,可靠性高,经济性好,具有通用性,可以方便的安装于多种机器人末端,提高了定子更换的生产效率,降低了工人的劳动强度,避免了高强度工作对人身造成伤害。

一种麻花钻头自动装卸装置
成熟度:通过小试
技术类型:-
应用行业:制造业
技术简介
本发明公开了一种麻花钻头自动装卸装置,包括传动部分和夹紧部分,所述传送部分包括导槽、普通电机、空心轴电机和弹性连接件,所述空心轴电机和普通电机由前至后设置在导槽中,且通过弹性连接件连接;所述夹紧部分包括内螺旋套、外螺旋套和弹簧夹头,所述内螺旋套设在外螺旋套的前面,且内螺旋套的前端与弹簧夹头连接;所述空心轴电机的电机轴通过传动件与外螺旋套连接,所述普通电机的电机轴依次穿过空心轴电机的电机轴通孔、传动件和外螺旋套与内螺旋套相连。本发明设计巧妙,科学合理,能有效提高麻花钻头的装卸效率和安全性,具有广阔的应用前景。



找到5项技术成果数据。
找技术 >一种半自动装卸电动平板转运车
成熟度:通过小试
技术类型:实用新型
应用行业:交通运输、仓储和邮政业,制造业
技术简介
本专利技术涉及一种半自动装卸电动平板转运车 项目简介:一种半自动装卸电动平板转运车,一种用于商超、车间、大型库房的小件货物周转的半自动装卸运输工具。 项目核心创新点:本车具有半自动装在功能,比传统搬运车具有省力搬运的优势,加上前后切换的驾驶优点可最大限度的提高货物的周转效率。 项目详细用途:是一种用于商超、车间、大型库房的小件货物周转的半自动装载运输工具。 预期效益说明:因半自动装卸电动平板转运车车体采用传统材料制造无特殊难度,故成本不会很高,预期效益明显。
基于机器视觉的悬链线上零件自动装卸技术的研究
成熟度:-
技术类型:-
应用行业:制造业
技术简介
该成果基于机器视觉技术,用面阵/线阵相机进行工件和吊钩的图像采集、图像处理与自动识别,对工件和吊钩定位,采用机器人抓取和搬运工件,将工件悬挂在悬链线上,自动化程度高,搬运速度快。目前还没有发现研究这方面的内容,技术水平和自动化程度高,操作方便。成果创新性:(1)悬链线上工件和吊钩的自动识别技术,该成果基于机器视觉的工件自动识别技术,使用面阵/线阵相机采集吊钩和工件图像,对吊钩和工件图像进行处理和特征点识别研究,并进行了工件和吊钩特征点的位置定位,开发了适合悬链线上工件和吊钩自动识别技术软件。(2)研发悬链线上工件搬运夹持器,针对悬链线上悬挂工件的结构形状,研发了车轮搬运夹持器、直角三通阀门搬运夹持器、辊道输送定位装置、薄板吸附搬运夹持器等,可用于悬链线上圆柱体、长方体、薄板类等形状的工件抓放搬运,也可以用于制造和搬运工程中的工件抓取。(3)悬链线上工件的自动装卸技术,研究了悬链线上移动工件的自动装卸技术,进行了机器人运动轨迹规划,采用机器人与悬链线同步移动过程中装卸工件,避免了发生工件和吊钩的干涉和碰撞现象,实现了工件的自动装卸,开发了控制系统软件。成果独占性:该成果基于机器视觉技术,用面阵/线阵相机进行工件和吊钩的图像采集、图像处理与自动识别,对工件和吊钩定位,采用机器人抓取和搬运工件,将工件悬挂在悬链线上,自动化程度高,搬运速度快。目前还没有发现研究这方面的内容,技术水平和自动化程度高,操作方便。成果盈利性:目前悬链线上的生产过程已经了实现自动化,但工件的装卸仍然是手工搬运,导致整个生产线生产效率低,成本增加。采用该成果机器人自动装卸工件,整个生产线全部实现自动化,自动化水平提高,产量大幅度增大,生产成本下降,企业将会带较大利润,同时工件的产品性能质量得到较大提高。成果持续性:该成果基于机器视觉技术识别和定位工件、吊钩,采用工业机器人和滚珠丝杠移动工作台抓取、搬运工件,将工件悬挂到连续移动的悬链线上。机器视觉技术和工业机器人技术是目前机、电、计算机和控制等技术相结合,是目前最先进的科学技术,具有较高技术储备和持续创新能力。成果先进性:该成果在工件和吊钩自动识别和定位、工件搬运夹持器方面达到国际先进水平。机器人重复定位精度±0.15mm,装/卸时间达到5个/min,目前国内外还没有研发悬链线自动装卸设备,在悬链线涂装应用方面已经达到国际先进水平,在悬链抛丸、悬链线干燥和悬链线家禽屠宰等生产线上目前国内外还没有应用,预计很快将会得到广泛应用。
散粮自动装卸运输车
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
本实用新型属于粮食运输技术领域,特别涉及一种用于散粮自动装卸运输车。此车由汽车行驶器件和散粮自动装卸器件两部分组成,其特征是散粮自动装卸器件由封闭式装粮车厢、车厢升降部件、螺旋式出料绞笼、风机式吸料卸料部件、关风出料器五部分组成,封闭式装粮车厢固装在车架上,车厢升降部件设在封闭式装粮车厢下部,车厢升降部件使用中使封闭式装粮车厢向侧面抬升,而非向后抬升,螺旋式出料绞笼、风机式吸料卸料部件固装在封闭式装粮车厢内,关风出料器固装在螺旋式出料绞笼下部的风机式吸料卸料部件的管道上。优点是装卸料速度快,卸料不堵塞,车厢内的散粮卸出干净,卸粮后几乎无残余粮食,不浪费能源。
一种用于自动装卸定子的机器人末端执行器
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
本实用新型涉及一种用于自动装卸定子的机器人末端执行器,包括基座、抓取机构、吸附检测机构,抓取机构和吸附检测机构与基座固定连接;抓取机构包括导向推动气缸、定位圆盘、气爪、延长块,导向推动气缸固定在基座上,导向推动气缸输出端与定位圆盘连接,气爪一端与基座固定连接,另一端与延长块连接;吸附检测机构包括工业相机、真空吸盘、吸盘架,吸盘架与基座固定连接,真空吸盘、工业相机固定在吸盘架上。优点是:结构合理简单,装调方便,可靠性高,经济性好,具有通用性,可以方便的安装于多种机器人末端,提高了定子更换的生产效率,降低了工人的劳动强度,避免了高强度工作对人身造成伤害。
一种麻花钻头自动装卸装置
成熟度:通过小试
技术类型:-
应用行业:制造业
技术简介
本发明公开了一种麻花钻头自动装卸装置,包括传动部分和夹紧部分,所述传送部分包括导槽、普通电机、空心轴电机和弹性连接件,所述空心轴电机和普通电机由前至后设置在导槽中,且通过弹性连接件连接;所述夹紧部分包括内螺旋套、外螺旋套和弹簧夹头,所述内螺旋套设在外螺旋套的前面,且内螺旋套的前端与弹簧夹头连接;所述空心轴电机的电机轴通过传动件与外螺旋套连接,所述普通电机的电机轴依次穿过空心轴电机的电机轴通孔、传动件和外螺旋套与内螺旋套相连。本发明设计巧妙,科学合理,能有效提高麻花钻头的装卸效率和安全性,具有广阔的应用前景。
找到5项技术成果数据。
找技术 >一种半自动装卸电动平板转运车
成熟度:通过小试
技术类型:实用新型
应用行业:交通运输、仓储和邮政业,制造业
技术简介
本专利技术涉及一种半自动装卸电动平板转运车 项目简介:一种半自动装卸电动平板转运车,一种用于商超、车间、大型库房的小件货物周转的半自动装卸运输工具。 项目核心创新点:本车具有半自动装在功能,比传统搬运车具有省力搬运的优势,加上前后切换的驾驶优点可最大限度的提高货物的周转效率。 项目详细用途:是一种用于商超、车间、大型库房的小件货物周转的半自动装载运输工具。 预期效益说明:因半自动装卸电动平板转运车车体采用传统材料制造无特殊难度,故成本不会很高,预期效益明显。
基于机器视觉的悬链线上零件自动装卸技术的研究
成熟度:-
技术类型:-
应用行业:制造业
技术简介
该成果基于机器视觉技术,用面阵/线阵相机进行工件和吊钩的图像采集、图像处理与自动识别,对工件和吊钩定位,采用机器人抓取和搬运工件,将工件悬挂在悬链线上,自动化程度高,搬运速度快。目前还没有发现研究这方面的内容,技术水平和自动化程度高,操作方便。成果创新性:(1)悬链线上工件和吊钩的自动识别技术,该成果基于机器视觉的工件自动识别技术,使用面阵/线阵相机采集吊钩和工件图像,对吊钩和工件图像进行处理和特征点识别研究,并进行了工件和吊钩特征点的位置定位,开发了适合悬链线上工件和吊钩自动识别技术软件。(2)研发悬链线上工件搬运夹持器,针对悬链线上悬挂工件的结构形状,研发了车轮搬运夹持器、直角三通阀门搬运夹持器、辊道输送定位装置、薄板吸附搬运夹持器等,可用于悬链线上圆柱体、长方体、薄板类等形状的工件抓放搬运,也可以用于制造和搬运工程中的工件抓取。(3)悬链线上工件的自动装卸技术,研究了悬链线上移动工件的自动装卸技术,进行了机器人运动轨迹规划,采用机器人与悬链线同步移动过程中装卸工件,避免了发生工件和吊钩的干涉和碰撞现象,实现了工件的自动装卸,开发了控制系统软件。成果独占性:该成果基于机器视觉技术,用面阵/线阵相机进行工件和吊钩的图像采集、图像处理与自动识别,对工件和吊钩定位,采用机器人抓取和搬运工件,将工件悬挂在悬链线上,自动化程度高,搬运速度快。目前还没有发现研究这方面的内容,技术水平和自动化程度高,操作方便。成果盈利性:目前悬链线上的生产过程已经了实现自动化,但工件的装卸仍然是手工搬运,导致整个生产线生产效率低,成本增加。采用该成果机器人自动装卸工件,整个生产线全部实现自动化,自动化水平提高,产量大幅度增大,生产成本下降,企业将会带较大利润,同时工件的产品性能质量得到较大提高。成果持续性:该成果基于机器视觉技术识别和定位工件、吊钩,采用工业机器人和滚珠丝杠移动工作台抓取、搬运工件,将工件悬挂到连续移动的悬链线上。机器视觉技术和工业机器人技术是目前机、电、计算机和控制等技术相结合,是目前最先进的科学技术,具有较高技术储备和持续创新能力。成果先进性:该成果在工件和吊钩自动识别和定位、工件搬运夹持器方面达到国际先进水平。机器人重复定位精度±0.15mm,装/卸时间达到5个/min,目前国内外还没有研发悬链线自动装卸设备,在悬链线涂装应用方面已经达到国际先进水平,在悬链抛丸、悬链线干燥和悬链线家禽屠宰等生产线上目前国内外还没有应用,预计很快将会得到广泛应用。
散粮自动装卸运输车
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
本实用新型属于粮食运输技术领域,特别涉及一种用于散粮自动装卸运输车。此车由汽车行驶器件和散粮自动装卸器件两部分组成,其特征是散粮自动装卸器件由封闭式装粮车厢、车厢升降部件、螺旋式出料绞笼、风机式吸料卸料部件、关风出料器五部分组成,封闭式装粮车厢固装在车架上,车厢升降部件设在封闭式装粮车厢下部,车厢升降部件使用中使封闭式装粮车厢向侧面抬升,而非向后抬升,螺旋式出料绞笼、风机式吸料卸料部件固装在封闭式装粮车厢内,关风出料器固装在螺旋式出料绞笼下部的风机式吸料卸料部件的管道上。优点是装卸料速度快,卸料不堵塞,车厢内的散粮卸出干净,卸粮后几乎无残余粮食,不浪费能源。
一种用于自动装卸定子的机器人末端执行器
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
本实用新型涉及一种用于自动装卸定子的机器人末端执行器,包括基座、抓取机构、吸附检测机构,抓取机构和吸附检测机构与基座固定连接;抓取机构包括导向推动气缸、定位圆盘、气爪、延长块,导向推动气缸固定在基座上,导向推动气缸输出端与定位圆盘连接,气爪一端与基座固定连接,另一端与延长块连接;吸附检测机构包括工业相机、真空吸盘、吸盘架,吸盘架与基座固定连接,真空吸盘、工业相机固定在吸盘架上。优点是:结构合理简单,装调方便,可靠性高,经济性好,具有通用性,可以方便的安装于多种机器人末端,提高了定子更换的生产效率,降低了工人的劳动强度,避免了高强度工作对人身造成伤害。
一种麻花钻头自动装卸装置
成熟度:通过小试
技术类型:-
应用行业:制造业
技术简介
本发明公开了一种麻花钻头自动装卸装置,包括传动部分和夹紧部分,所述传送部分包括导槽、普通电机、空心轴电机和弹性连接件,所述空心轴电机和普通电机由前至后设置在导槽中,且通过弹性连接件连接;所述夹紧部分包括内螺旋套、外螺旋套和弹簧夹头,所述内螺旋套设在外螺旋套的前面,且内螺旋套的前端与弹簧夹头连接;所述空心轴电机的电机轴通过传动件与外螺旋套连接,所述普通电机的电机轴依次穿过空心轴电机的电机轴通孔、传动件和外螺旋套与内螺旋套相连。本发明设计巧妙,科学合理,能有效提高麻花钻头的装卸效率和安全性,具有广阔的应用前景。
找到5项技术成果数据。
找技术 >一种半自动装卸电动平板转运车
成熟度:通过小试
技术类型:实用新型
应用行业:交通运输、仓储和邮政业,制造业
技术简介
本专利技术涉及一种半自动装卸电动平板转运车 项目简介:一种半自动装卸电动平板转运车,一种用于商超、车间、大型库房的小件货物周转的半自动装卸运输工具。 项目核心创新点:本车具有半自动装在功能,比传统搬运车具有省力搬运的优势,加上前后切换的驾驶优点可最大限度的提高货物的周转效率。 项目详细用途:是一种用于商超、车间、大型库房的小件货物周转的半自动装载运输工具。 预期效益说明:因半自动装卸电动平板转运车车体采用传统材料制造无特殊难度,故成本不会很高,预期效益明显。
基于机器视觉的悬链线上零件自动装卸技术的研究
成熟度:-
技术类型:-
应用行业:制造业
技术简介
该成果基于机器视觉技术,用面阵/线阵相机进行工件和吊钩的图像采集、图像处理与自动识别,对工件和吊钩定位,采用机器人抓取和搬运工件,将工件悬挂在悬链线上,自动化程度高,搬运速度快。目前还没有发现研究这方面的内容,技术水平和自动化程度高,操作方便。成果创新性:(1)悬链线上工件和吊钩的自动识别技术,该成果基于机器视觉的工件自动识别技术,使用面阵/线阵相机采集吊钩和工件图像,对吊钩和工件图像进行处理和特征点识别研究,并进行了工件和吊钩特征点的位置定位,开发了适合悬链线上工件和吊钩自动识别技术软件。(2)研发悬链线上工件搬运夹持器,针对悬链线上悬挂工件的结构形状,研发了车轮搬运夹持器、直角三通阀门搬运夹持器、辊道输送定位装置、薄板吸附搬运夹持器等,可用于悬链线上圆柱体、长方体、薄板类等形状的工件抓放搬运,也可以用于制造和搬运工程中的工件抓取。(3)悬链线上工件的自动装卸技术,研究了悬链线上移动工件的自动装卸技术,进行了机器人运动轨迹规划,采用机器人与悬链线同步移动过程中装卸工件,避免了发生工件和吊钩的干涉和碰撞现象,实现了工件的自动装卸,开发了控制系统软件。成果独占性:该成果基于机器视觉技术,用面阵/线阵相机进行工件和吊钩的图像采集、图像处理与自动识别,对工件和吊钩定位,采用机器人抓取和搬运工件,将工件悬挂在悬链线上,自动化程度高,搬运速度快。目前还没有发现研究这方面的内容,技术水平和自动化程度高,操作方便。成果盈利性:目前悬链线上的生产过程已经了实现自动化,但工件的装卸仍然是手工搬运,导致整个生产线生产效率低,成本增加。采用该成果机器人自动装卸工件,整个生产线全部实现自动化,自动化水平提高,产量大幅度增大,生产成本下降,企业将会带较大利润,同时工件的产品性能质量得到较大提高。成果持续性:该成果基于机器视觉技术识别和定位工件、吊钩,采用工业机器人和滚珠丝杠移动工作台抓取、搬运工件,将工件悬挂到连续移动的悬链线上。机器视觉技术和工业机器人技术是目前机、电、计算机和控制等技术相结合,是目前最先进的科学技术,具有较高技术储备和持续创新能力。成果先进性:该成果在工件和吊钩自动识别和定位、工件搬运夹持器方面达到国际先进水平。机器人重复定位精度±0.15mm,装/卸时间达到5个/min,目前国内外还没有研发悬链线自动装卸设备,在悬链线涂装应用方面已经达到国际先进水平,在悬链抛丸、悬链线干燥和悬链线家禽屠宰等生产线上目前国内外还没有应用,预计很快将会得到广泛应用。
散粮自动装卸运输车
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
本实用新型属于粮食运输技术领域,特别涉及一种用于散粮自动装卸运输车。此车由汽车行驶器件和散粮自动装卸器件两部分组成,其特征是散粮自动装卸器件由封闭式装粮车厢、车厢升降部件、螺旋式出料绞笼、风机式吸料卸料部件、关风出料器五部分组成,封闭式装粮车厢固装在车架上,车厢升降部件设在封闭式装粮车厢下部,车厢升降部件使用中使封闭式装粮车厢向侧面抬升,而非向后抬升,螺旋式出料绞笼、风机式吸料卸料部件固装在封闭式装粮车厢内,关风出料器固装在螺旋式出料绞笼下部的风机式吸料卸料部件的管道上。优点是装卸料速度快,卸料不堵塞,车厢内的散粮卸出干净,卸粮后几乎无残余粮食,不浪费能源。
一种用于自动装卸定子的机器人末端执行器
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
本实用新型涉及一种用于自动装卸定子的机器人末端执行器,包括基座、抓取机构、吸附检测机构,抓取机构和吸附检测机构与基座固定连接;抓取机构包括导向推动气缸、定位圆盘、气爪、延长块,导向推动气缸固定在基座上,导向推动气缸输出端与定位圆盘连接,气爪一端与基座固定连接,另一端与延长块连接;吸附检测机构包括工业相机、真空吸盘、吸盘架,吸盘架与基座固定连接,真空吸盘、工业相机固定在吸盘架上。优点是:结构合理简单,装调方便,可靠性高,经济性好,具有通用性,可以方便的安装于多种机器人末端,提高了定子更换的生产效率,降低了工人的劳动强度,避免了高强度工作对人身造成伤害。
一种麻花钻头自动装卸装置
成熟度:通过小试
技术类型:-
应用行业:制造业
技术简介
本发明公开了一种麻花钻头自动装卸装置,包括传动部分和夹紧部分,所述传送部分包括导槽、普通电机、空心轴电机和弹性连接件,所述空心轴电机和普通电机由前至后设置在导槽中,且通过弹性连接件连接;所述夹紧部分包括内螺旋套、外螺旋套和弹簧夹头,所述内螺旋套设在外螺旋套的前面,且内螺旋套的前端与弹簧夹头连接;所述空心轴电机的电机轴通过传动件与外螺旋套连接,所述普通电机的电机轴依次穿过空心轴电机的电机轴通孔、传动件和外螺旋套与内螺旋套相连。本发明设计巧妙,科学合理,能有效提高麻花钻头的装卸效率和安全性,具有广阔的应用前景。
找到5项技术成果数据。
找技术 >一种半自动装卸电动平板转运车
成熟度:通过小试
技术类型:实用新型
应用行业:交通运输、仓储和邮政业,制造业
技术简介
本专利技术涉及一种半自动装卸电动平板转运车 项目简介:一种半自动装卸电动平板转运车,一种用于商超、车间、大型库房的小件货物周转的半自动装卸运输工具。 项目核心创新点:本车具有半自动装在功能,比传统搬运车具有省力搬运的优势,加上前后切换的驾驶优点可最大限度的提高货物的周转效率。 项目详细用途:是一种用于商超、车间、大型库房的小件货物周转的半自动装载运输工具。 预期效益说明:因半自动装卸电动平板转运车车体采用传统材料制造无特殊难度,故成本不会很高,预期效益明显。
基于机器视觉的悬链线上零件自动装卸技术的研究
成熟度:-
技术类型:-
应用行业:制造业
技术简介
该成果基于机器视觉技术,用面阵/线阵相机进行工件和吊钩的图像采集、图像处理与自动识别,对工件和吊钩定位,采用机器人抓取和搬运工件,将工件悬挂在悬链线上,自动化程度高,搬运速度快。目前还没有发现研究这方面的内容,技术水平和自动化程度高,操作方便。成果创新性:(1)悬链线上工件和吊钩的自动识别技术,该成果基于机器视觉的工件自动识别技术,使用面阵/线阵相机采集吊钩和工件图像,对吊钩和工件图像进行处理和特征点识别研究,并进行了工件和吊钩特征点的位置定位,开发了适合悬链线上工件和吊钩自动识别技术软件。(2)研发悬链线上工件搬运夹持器,针对悬链线上悬挂工件的结构形状,研发了车轮搬运夹持器、直角三通阀门搬运夹持器、辊道输送定位装置、薄板吸附搬运夹持器等,可用于悬链线上圆柱体、长方体、薄板类等形状的工件抓放搬运,也可以用于制造和搬运工程中的工件抓取。(3)悬链线上工件的自动装卸技术,研究了悬链线上移动工件的自动装卸技术,进行了机器人运动轨迹规划,采用机器人与悬链线同步移动过程中装卸工件,避免了发生工件和吊钩的干涉和碰撞现象,实现了工件的自动装卸,开发了控制系统软件。成果独占性:该成果基于机器视觉技术,用面阵/线阵相机进行工件和吊钩的图像采集、图像处理与自动识别,对工件和吊钩定位,采用机器人抓取和搬运工件,将工件悬挂在悬链线上,自动化程度高,搬运速度快。目前还没有发现研究这方面的内容,技术水平和自动化程度高,操作方便。成果盈利性:目前悬链线上的生产过程已经了实现自动化,但工件的装卸仍然是手工搬运,导致整个生产线生产效率低,成本增加。采用该成果机器人自动装卸工件,整个生产线全部实现自动化,自动化水平提高,产量大幅度增大,生产成本下降,企业将会带较大利润,同时工件的产品性能质量得到较大提高。成果持续性:该成果基于机器视觉技术识别和定位工件、吊钩,采用工业机器人和滚珠丝杠移动工作台抓取、搬运工件,将工件悬挂到连续移动的悬链线上。机器视觉技术和工业机器人技术是目前机、电、计算机和控制等技术相结合,是目前最先进的科学技术,具有较高技术储备和持续创新能力。成果先进性:该成果在工件和吊钩自动识别和定位、工件搬运夹持器方面达到国际先进水平。机器人重复定位精度±0.15mm,装/卸时间达到5个/min,目前国内外还没有研发悬链线自动装卸设备,在悬链线涂装应用方面已经达到国际先进水平,在悬链抛丸、悬链线干燥和悬链线家禽屠宰等生产线上目前国内外还没有应用,预计很快将会得到广泛应用。
散粮自动装卸运输车
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
本实用新型属于粮食运输技术领域,特别涉及一种用于散粮自动装卸运输车。此车由汽车行驶器件和散粮自动装卸器件两部分组成,其特征是散粮自动装卸器件由封闭式装粮车厢、车厢升降部件、螺旋式出料绞笼、风机式吸料卸料部件、关风出料器五部分组成,封闭式装粮车厢固装在车架上,车厢升降部件设在封闭式装粮车厢下部,车厢升降部件使用中使封闭式装粮车厢向侧面抬升,而非向后抬升,螺旋式出料绞笼、风机式吸料卸料部件固装在封闭式装粮车厢内,关风出料器固装在螺旋式出料绞笼下部的风机式吸料卸料部件的管道上。优点是装卸料速度快,卸料不堵塞,车厢内的散粮卸出干净,卸粮后几乎无残余粮食,不浪费能源。
一种用于自动装卸定子的机器人末端执行器
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
本实用新型涉及一种用于自动装卸定子的机器人末端执行器,包括基座、抓取机构、吸附检测机构,抓取机构和吸附检测机构与基座固定连接;抓取机构包括导向推动气缸、定位圆盘、气爪、延长块,导向推动气缸固定在基座上,导向推动气缸输出端与定位圆盘连接,气爪一端与基座固定连接,另一端与延长块连接;吸附检测机构包括工业相机、真空吸盘、吸盘架,吸盘架与基座固定连接,真空吸盘、工业相机固定在吸盘架上。优点是:结构合理简单,装调方便,可靠性高,经济性好,具有通用性,可以方便的安装于多种机器人末端,提高了定子更换的生产效率,降低了工人的劳动强度,避免了高强度工作对人身造成伤害。
一种麻花钻头自动装卸装置
成熟度:通过小试
技术类型:-
应用行业:制造业
技术简介
本发明公开了一种麻花钻头自动装卸装置,包括传动部分和夹紧部分,所述传送部分包括导槽、普通电机、空心轴电机和弹性连接件,所述空心轴电机和普通电机由前至后设置在导槽中,且通过弹性连接件连接;所述夹紧部分包括内螺旋套、外螺旋套和弹簧夹头,所述内螺旋套设在外螺旋套的前面,且内螺旋套的前端与弹簧夹头连接;所述空心轴电机的电机轴通过传动件与外螺旋套连接,所述普通电机的电机轴依次穿过空心轴电机的电机轴通孔、传动件和外螺旋套与内螺旋套相连。本发明设计巧妙,科学合理,能有效提高麻花钻头的装卸效率和安全性,具有广阔的应用前景。
找到5项技术成果数据。
找技术 >一种半自动装卸电动平板转运车
成熟度:通过小试
技术类型:实用新型
应用行业:交通运输、仓储和邮政业,制造业
技术简介
本专利技术涉及一种半自动装卸电动平板转运车 项目简介:一种半自动装卸电动平板转运车,一种用于商超、车间、大型库房的小件货物周转的半自动装卸运输工具。 项目核心创新点:本车具有半自动装在功能,比传统搬运车具有省力搬运的优势,加上前后切换的驾驶优点可最大限度的提高货物的周转效率。 项目详细用途:是一种用于商超、车间、大型库房的小件货物周转的半自动装载运输工具。 预期效益说明:因半自动装卸电动平板转运车车体采用传统材料制造无特殊难度,故成本不会很高,预期效益明显。
基于机器视觉的悬链线上零件自动装卸技术的研究
成熟度:-
技术类型:-
应用行业:制造业
技术简介
该成果基于机器视觉技术,用面阵/线阵相机进行工件和吊钩的图像采集、图像处理与自动识别,对工件和吊钩定位,采用机器人抓取和搬运工件,将工件悬挂在悬链线上,自动化程度高,搬运速度快。目前还没有发现研究这方面的内容,技术水平和自动化程度高,操作方便。成果创新性:(1)悬链线上工件和吊钩的自动识别技术,该成果基于机器视觉的工件自动识别技术,使用面阵/线阵相机采集吊钩和工件图像,对吊钩和工件图像进行处理和特征点识别研究,并进行了工件和吊钩特征点的位置定位,开发了适合悬链线上工件和吊钩自动识别技术软件。(2)研发悬链线上工件搬运夹持器,针对悬链线上悬挂工件的结构形状,研发了车轮搬运夹持器、直角三通阀门搬运夹持器、辊道输送定位装置、薄板吸附搬运夹持器等,可用于悬链线上圆柱体、长方体、薄板类等形状的工件抓放搬运,也可以用于制造和搬运工程中的工件抓取。(3)悬链线上工件的自动装卸技术,研究了悬链线上移动工件的自动装卸技术,进行了机器人运动轨迹规划,采用机器人与悬链线同步移动过程中装卸工件,避免了发生工件和吊钩的干涉和碰撞现象,实现了工件的自动装卸,开发了控制系统软件。成果独占性:该成果基于机器视觉技术,用面阵/线阵相机进行工件和吊钩的图像采集、图像处理与自动识别,对工件和吊钩定位,采用机器人抓取和搬运工件,将工件悬挂在悬链线上,自动化程度高,搬运速度快。目前还没有发现研究这方面的内容,技术水平和自动化程度高,操作方便。成果盈利性:目前悬链线上的生产过程已经了实现自动化,但工件的装卸仍然是手工搬运,导致整个生产线生产效率低,成本增加。采用该成果机器人自动装卸工件,整个生产线全部实现自动化,自动化水平提高,产量大幅度增大,生产成本下降,企业将会带较大利润,同时工件的产品性能质量得到较大提高。成果持续性:该成果基于机器视觉技术识别和定位工件、吊钩,采用工业机器人和滚珠丝杠移动工作台抓取、搬运工件,将工件悬挂到连续移动的悬链线上。机器视觉技术和工业机器人技术是目前机、电、计算机和控制等技术相结合,是目前最先进的科学技术,具有较高技术储备和持续创新能力。成果先进性:该成果在工件和吊钩自动识别和定位、工件搬运夹持器方面达到国际先进水平。机器人重复定位精度±0.15mm,装/卸时间达到5个/min,目前国内外还没有研发悬链线自动装卸设备,在悬链线涂装应用方面已经达到国际先进水平,在悬链抛丸、悬链线干燥和悬链线家禽屠宰等生产线上目前国内外还没有应用,预计很快将会得到广泛应用。
散粮自动装卸运输车
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
本实用新型属于粮食运输技术领域,特别涉及一种用于散粮自动装卸运输车。此车由汽车行驶器件和散粮自动装卸器件两部分组成,其特征是散粮自动装卸器件由封闭式装粮车厢、车厢升降部件、螺旋式出料绞笼、风机式吸料卸料部件、关风出料器五部分组成,封闭式装粮车厢固装在车架上,车厢升降部件设在封闭式装粮车厢下部,车厢升降部件使用中使封闭式装粮车厢向侧面抬升,而非向后抬升,螺旋式出料绞笼、风机式吸料卸料部件固装在封闭式装粮车厢内,关风出料器固装在螺旋式出料绞笼下部的风机式吸料卸料部件的管道上。优点是装卸料速度快,卸料不堵塞,车厢内的散粮卸出干净,卸粮后几乎无残余粮食,不浪费能源。
一种用于自动装卸定子的机器人末端执行器
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
本实用新型涉及一种用于自动装卸定子的机器人末端执行器,包括基座、抓取机构、吸附检测机构,抓取机构和吸附检测机构与基座固定连接;抓取机构包括导向推动气缸、定位圆盘、气爪、延长块,导向推动气缸固定在基座上,导向推动气缸输出端与定位圆盘连接,气爪一端与基座固定连接,另一端与延长块连接;吸附检测机构包括工业相机、真空吸盘、吸盘架,吸盘架与基座固定连接,真空吸盘、工业相机固定在吸盘架上。优点是:结构合理简单,装调方便,可靠性高,经济性好,具有通用性,可以方便的安装于多种机器人末端,提高了定子更换的生产效率,降低了工人的劳动强度,避免了高强度工作对人身造成伤害。
一种麻花钻头自动装卸装置
成熟度:通过小试
技术类型:-
应用行业:制造业
技术简介
本发明公开了一种麻花钻头自动装卸装置,包括传动部分和夹紧部分,所述传送部分包括导槽、普通电机、空心轴电机和弹性连接件,所述空心轴电机和普通电机由前至后设置在导槽中,且通过弹性连接件连接;所述夹紧部分包括内螺旋套、外螺旋套和弹簧夹头,所述内螺旋套设在外螺旋套的前面,且内螺旋套的前端与弹簧夹头连接;所述空心轴电机的电机轴通过传动件与外螺旋套连接,所述普通电机的电机轴依次穿过空心轴电机的电机轴通孔、传动件和外螺旋套与内螺旋套相连。本发明设计巧妙,科学合理,能有效提高麻花钻头的装卸效率和安全性,具有广阔的应用前景。
找到5项技术成果数据。
找技术 >一种半自动装卸电动平板转运车
成熟度:通过小试
技术类型:实用新型
应用行业:交通运输、仓储和邮政业,制造业
技术简介
本专利技术涉及一种半自动装卸电动平板转运车 项目简介:一种半自动装卸电动平板转运车,一种用于商超、车间、大型库房的小件货物周转的半自动装卸运输工具。 项目核心创新点:本车具有半自动装在功能,比传统搬运车具有省力搬运的优势,加上前后切换的驾驶优点可最大限度的提高货物的周转效率。 项目详细用途:是一种用于商超、车间、大型库房的小件货物周转的半自动装载运输工具。 预期效益说明:因半自动装卸电动平板转运车车体采用传统材料制造无特殊难度,故成本不会很高,预期效益明显。
基于机器视觉的悬链线上零件自动装卸技术的研究
成熟度:-
技术类型:-
应用行业:制造业
技术简介
该成果基于机器视觉技术,用面阵/线阵相机进行工件和吊钩的图像采集、图像处理与自动识别,对工件和吊钩定位,采用机器人抓取和搬运工件,将工件悬挂在悬链线上,自动化程度高,搬运速度快。目前还没有发现研究这方面的内容,技术水平和自动化程度高,操作方便。成果创新性:(1)悬链线上工件和吊钩的自动识别技术,该成果基于机器视觉的工件自动识别技术,使用面阵/线阵相机采集吊钩和工件图像,对吊钩和工件图像进行处理和特征点识别研究,并进行了工件和吊钩特征点的位置定位,开发了适合悬链线上工件和吊钩自动识别技术软件。(2)研发悬链线上工件搬运夹持器,针对悬链线上悬挂工件的结构形状,研发了车轮搬运夹持器、直角三通阀门搬运夹持器、辊道输送定位装置、薄板吸附搬运夹持器等,可用于悬链线上圆柱体、长方体、薄板类等形状的工件抓放搬运,也可以用于制造和搬运工程中的工件抓取。(3)悬链线上工件的自动装卸技术,研究了悬链线上移动工件的自动装卸技术,进行了机器人运动轨迹规划,采用机器人与悬链线同步移动过程中装卸工件,避免了发生工件和吊钩的干涉和碰撞现象,实现了工件的自动装卸,开发了控制系统软件。成果独占性:该成果基于机器视觉技术,用面阵/线阵相机进行工件和吊钩的图像采集、图像处理与自动识别,对工件和吊钩定位,采用机器人抓取和搬运工件,将工件悬挂在悬链线上,自动化程度高,搬运速度快。目前还没有发现研究这方面的内容,技术水平和自动化程度高,操作方便。成果盈利性:目前悬链线上的生产过程已经了实现自动化,但工件的装卸仍然是手工搬运,导致整个生产线生产效率低,成本增加。采用该成果机器人自动装卸工件,整个生产线全部实现自动化,自动化水平提高,产量大幅度增大,生产成本下降,企业将会带较大利润,同时工件的产品性能质量得到较大提高。成果持续性:该成果基于机器视觉技术识别和定位工件、吊钩,采用工业机器人和滚珠丝杠移动工作台抓取、搬运工件,将工件悬挂到连续移动的悬链线上。机器视觉技术和工业机器人技术是目前机、电、计算机和控制等技术相结合,是目前最先进的科学技术,具有较高技术储备和持续创新能力。成果先进性:该成果在工件和吊钩自动识别和定位、工件搬运夹持器方面达到国际先进水平。机器人重复定位精度±0.15mm,装/卸时间达到5个/min,目前国内外还没有研发悬链线自动装卸设备,在悬链线涂装应用方面已经达到国际先进水平,在悬链抛丸、悬链线干燥和悬链线家禽屠宰等生产线上目前国内外还没有应用,预计很快将会得到广泛应用。
散粮自动装卸运输车
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
本实用新型属于粮食运输技术领域,特别涉及一种用于散粮自动装卸运输车。此车由汽车行驶器件和散粮自动装卸器件两部分组成,其特征是散粮自动装卸器件由封闭式装粮车厢、车厢升降部件、螺旋式出料绞笼、风机式吸料卸料部件、关风出料器五部分组成,封闭式装粮车厢固装在车架上,车厢升降部件设在封闭式装粮车厢下部,车厢升降部件使用中使封闭式装粮车厢向侧面抬升,而非向后抬升,螺旋式出料绞笼、风机式吸料卸料部件固装在封闭式装粮车厢内,关风出料器固装在螺旋式出料绞笼下部的风机式吸料卸料部件的管道上。优点是装卸料速度快,卸料不堵塞,车厢内的散粮卸出干净,卸粮后几乎无残余粮食,不浪费能源。
一种用于自动装卸定子的机器人末端执行器
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
本实用新型涉及一种用于自动装卸定子的机器人末端执行器,包括基座、抓取机构、吸附检测机构,抓取机构和吸附检测机构与基座固定连接;抓取机构包括导向推动气缸、定位圆盘、气爪、延长块,导向推动气缸固定在基座上,导向推动气缸输出端与定位圆盘连接,气爪一端与基座固定连接,另一端与延长块连接;吸附检测机构包括工业相机、真空吸盘、吸盘架,吸盘架与基座固定连接,真空吸盘、工业相机固定在吸盘架上。优点是:结构合理简单,装调方便,可靠性高,经济性好,具有通用性,可以方便的安装于多种机器人末端,提高了定子更换的生产效率,降低了工人的劳动强度,避免了高强度工作对人身造成伤害。
一种麻花钻头自动装卸装置
成熟度:通过小试
技术类型:-
应用行业:制造业
技术简介
本发明公开了一种麻花钻头自动装卸装置,包括传动部分和夹紧部分,所述传送部分包括导槽、普通电机、空心轴电机和弹性连接件,所述空心轴电机和普通电机由前至后设置在导槽中,且通过弹性连接件连接;所述夹紧部分包括内螺旋套、外螺旋套和弹簧夹头,所述内螺旋套设在外螺旋套的前面,且内螺旋套的前端与弹簧夹头连接;所述空心轴电机的电机轴通过传动件与外螺旋套连接,所述普通电机的电机轴依次穿过空心轴电机的电机轴通孔、传动件和外螺旋套与内螺旋套相连。本发明设计巧妙,科学合理,能有效提高麻花钻头的装卸效率和安全性,具有广阔的应用前景。
找到5项技术成果数据。
找技术 >一种半自动装卸电动平板转运车
成熟度:通过小试
技术类型:实用新型
应用行业:交通运输、仓储和邮政业,制造业
技术简介
本专利技术涉及一种半自动装卸电动平板转运车 项目简介:一种半自动装卸电动平板转运车,一种用于商超、车间、大型库房的小件货物周转的半自动装卸运输工具。 项目核心创新点:本车具有半自动装在功能,比传统搬运车具有省力搬运的优势,加上前后切换的驾驶优点可最大限度的提高货物的周转效率。 项目详细用途:是一种用于商超、车间、大型库房的小件货物周转的半自动装载运输工具。 预期效益说明:因半自动装卸电动平板转运车车体采用传统材料制造无特殊难度,故成本不会很高,预期效益明显。
基于机器视觉的悬链线上零件自动装卸技术的研究
成熟度:-
技术类型:-
应用行业:制造业
技术简介
该成果基于机器视觉技术,用面阵/线阵相机进行工件和吊钩的图像采集、图像处理与自动识别,对工件和吊钩定位,采用机器人抓取和搬运工件,将工件悬挂在悬链线上,自动化程度高,搬运速度快。目前还没有发现研究这方面的内容,技术水平和自动化程度高,操作方便。成果创新性:(1)悬链线上工件和吊钩的自动识别技术,该成果基于机器视觉的工件自动识别技术,使用面阵/线阵相机采集吊钩和工件图像,对吊钩和工件图像进行处理和特征点识别研究,并进行了工件和吊钩特征点的位置定位,开发了适合悬链线上工件和吊钩自动识别技术软件。(2)研发悬链线上工件搬运夹持器,针对悬链线上悬挂工件的结构形状,研发了车轮搬运夹持器、直角三通阀门搬运夹持器、辊道输送定位装置、薄板吸附搬运夹持器等,可用于悬链线上圆柱体、长方体、薄板类等形状的工件抓放搬运,也可以用于制造和搬运工程中的工件抓取。(3)悬链线上工件的自动装卸技术,研究了悬链线上移动工件的自动装卸技术,进行了机器人运动轨迹规划,采用机器人与悬链线同步移动过程中装卸工件,避免了发生工件和吊钩的干涉和碰撞现象,实现了工件的自动装卸,开发了控制系统软件。成果独占性:该成果基于机器视觉技术,用面阵/线阵相机进行工件和吊钩的图像采集、图像处理与自动识别,对工件和吊钩定位,采用机器人抓取和搬运工件,将工件悬挂在悬链线上,自动化程度高,搬运速度快。目前还没有发现研究这方面的内容,技术水平和自动化程度高,操作方便。成果盈利性:目前悬链线上的生产过程已经了实现自动化,但工件的装卸仍然是手工搬运,导致整个生产线生产效率低,成本增加。采用该成果机器人自动装卸工件,整个生产线全部实现自动化,自动化水平提高,产量大幅度增大,生产成本下降,企业将会带较大利润,同时工件的产品性能质量得到较大提高。成果持续性:该成果基于机器视觉技术识别和定位工件、吊钩,采用工业机器人和滚珠丝杠移动工作台抓取、搬运工件,将工件悬挂到连续移动的悬链线上。机器视觉技术和工业机器人技术是目前机、电、计算机和控制等技术相结合,是目前最先进的科学技术,具有较高技术储备和持续创新能力。成果先进性:该成果在工件和吊钩自动识别和定位、工件搬运夹持器方面达到国际先进水平。机器人重复定位精度±0.15mm,装/卸时间达到5个/min,目前国内外还没有研发悬链线自动装卸设备,在悬链线涂装应用方面已经达到国际先进水平,在悬链抛丸、悬链线干燥和悬链线家禽屠宰等生产线上目前国内外还没有应用,预计很快将会得到广泛应用。
散粮自动装卸运输车
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
本实用新型属于粮食运输技术领域,特别涉及一种用于散粮自动装卸运输车。此车由汽车行驶器件和散粮自动装卸器件两部分组成,其特征是散粮自动装卸器件由封闭式装粮车厢、车厢升降部件、螺旋式出料绞笼、风机式吸料卸料部件、关风出料器五部分组成,封闭式装粮车厢固装在车架上,车厢升降部件设在封闭式装粮车厢下部,车厢升降部件使用中使封闭式装粮车厢向侧面抬升,而非向后抬升,螺旋式出料绞笼、风机式吸料卸料部件固装在封闭式装粮车厢内,关风出料器固装在螺旋式出料绞笼下部的风机式吸料卸料部件的管道上。优点是装卸料速度快,卸料不堵塞,车厢内的散粮卸出干净,卸粮后几乎无残余粮食,不浪费能源。
一种用于自动装卸定子的机器人末端执行器
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
本实用新型涉及一种用于自动装卸定子的机器人末端执行器,包括基座、抓取机构、吸附检测机构,抓取机构和吸附检测机构与基座固定连接;抓取机构包括导向推动气缸、定位圆盘、气爪、延长块,导向推动气缸固定在基座上,导向推动气缸输出端与定位圆盘连接,气爪一端与基座固定连接,另一端与延长块连接;吸附检测机构包括工业相机、真空吸盘、吸盘架,吸盘架与基座固定连接,真空吸盘、工业相机固定在吸盘架上。优点是:结构合理简单,装调方便,可靠性高,经济性好,具有通用性,可以方便的安装于多种机器人末端,提高了定子更换的生产效率,降低了工人的劳动强度,避免了高强度工作对人身造成伤害。
一种麻花钻头自动装卸装置
成熟度:通过小试
技术类型:-
应用行业:制造业
技术简介
本发明公开了一种麻花钻头自动装卸装置,包括传动部分和夹紧部分,所述传送部分包括导槽、普通电机、空心轴电机和弹性连接件,所述空心轴电机和普通电机由前至后设置在导槽中,且通过弹性连接件连接;所述夹紧部分包括内螺旋套、外螺旋套和弹簧夹头,所述内螺旋套设在外螺旋套的前面,且内螺旋套的前端与弹簧夹头连接;所述空心轴电机的电机轴通过传动件与外螺旋套连接,所述普通电机的电机轴依次穿过空心轴电机的电机轴通孔、传动件和外螺旋套与内螺旋套相连。本发明设计巧妙,科学合理,能有效提高麻花钻头的装卸效率和安全性,具有广阔的应用前景。