STM32F407上FSMC的SRAM驱动问题,总是有个别字节不出来不对
各位:我用的是STM32F407IGT6 驱动IS61Wv25616BLL-10TLI。在测试SRAM过程中发现,写入的数据读出来去总是有个别地址数据不对(整个512KB也就30个左右字节有问题,地址是随机的)。但是通过仿真器直接看Memory里的数据确是对的。如果通过修改代码,在出错的地址从新读一次,也能读出正确数据。在开发板上读写每次都是正常的。自己画的主板仅仅调整了CS(代码也做了相应调整)可就是总有上述问题。难道是布线问题?数据线、地址线、一定要等长?频率不高啊,168MHZ,。然后8分频后一样出错。我看网络上说SRAM问题的基本都是STM的用户,难道真有什么特别要注意的地方?一下是我的源码请大侠指正:void SRAM_Init(void){ FSMC_NORSRAMInitTypeDef FSMC_NORSRAMInitStructure; FSMC_NORSRAMtimingInitTypeDef p; GPIO_InitTypeDef GPIO_InitStructure; /* Enable GPIOs clock */ RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOD | RCC_AHB1Periph_GPIOE | RCC_AHB1Periph_GPIOF | RCC_AHB1Periph_GPIOG , ENABLE); /* Enable FSMC clock */ RCC_AHB3PeriphClockCmd(RCC_AHB3Periph_FSMC, ENABLE); /*-- GPIOs Configuration -----------------------------------------------------*//* +-------------------+--------------------+------------------+------------------+ + SRAM pins assignment + +-------------------+--------------------+------------------+------------------+ | PD0 FSMC_D2 | PE0 FSMC_NBL0 | PF0 FSMC_A0 | PG0 FSMC_A10 | | PD1 FSMC_D3 | PE1 FSMC_NBL1 | PF1 FSMC_A1 | PG1 FSMC_a11 | | PD4 FSMC_NOE | PE3 FSMC_A19 | PF2 FSMC_A2 | PG2 FSMC_A12 | | PD5 FSMC_NWE | PE4 FSMC_A20 | PF3 FSMC_A3 | PG3 FSMC_A13 | | PD8 FSMC_D13 | PE7 FSMC_D4 | PF4 FSMC_A4 | PG4 FSMC_A14 | | PD9 FSMC_D14 | PE8 FSMC_D5 | PF5 FSMC_A5 | PG5 FSMC_A15 | | PD10 FSMC_D15 | PE9 FSMC_D6 | PF12 FSMC_A6 | PG9 FSMC_NE2 | | PD11 FSMC_A16 | PE10 FSMC_D7 | PF13 FSMC_A7 |------------------+ | PD12 FSMC_A17 | PE11 FSMC_D8 | PF14 FSMC_A8 | | PD13 FSMC_A18 | PE12 FSMC_D9 | PF15 FSMC_A9 | | PD14 FSMC_D0 | PE13 FSMC_D10 |------------------+ | PD15 FSMC_D1 | PE14 FSMC_D11 | | | PE15 FSMC_D12 | +-------------------+--------------------+*/ /* GPIOD configuration */ GPIO_PinAFConfig(GPIOD, GPIO_PinSource0, GPIO_AF_FSMC); GPIO_PinAFConfig(GPIOD, GPIO_PinSource1, GPIO_AF_FSMC); GPIO_PinAFConfig(GPIOD, GPIO_PinSource4, GPIO_AF_FSMC); GPIO_PinAFConfig(GPIOD, GPIO_PinSource5, GPIO_AF_FSMC); GPIO_PinAFConfig(GPIOD, GPIO_PinSource7, GPIO_AF_FSMC); //cs1 GPIO_PinAFConfig(GPIOD, GPIO_PinSource8, GPIO_AF_FSMC); GPIO_PinAFConfig(GPIOD, GPIO_PinSource9, GPIO_AF_FSMC); GPIO_PinAFConfig(GPIOD, GPIO_PinSource10, GPIO_AF_FSMC); GPIO_PinAFConfig(GPIOD, GPIO_PinSource11, GPIO_AF_FSMC); GPIO_PinAFConfig(GPIOD, GPIO_PinSource12, GPIO_AF_FSMC); GPIO_PinAFConfig(GPIOD, GPIO_PinSource13, GPIO_AF_FSMC); GPIO_PinAFConfig(GPIOD, GPIO_PinSource14, GPIO_AF_FSMC); GPIO_PinAFConfig(GPIOD, GPIO_PinSource15, GPIO_AF_FSMC); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1 | GPIO_Pin_4 | GPIO_Pin_5 | GPIO_Pin_7 | GPIO_Pin_8 | GPIO_Pin_9 | GPIO_Pin_10 | GPIO_Pin_11 | GPIO_Pin_12 | GPIO_Pin_13 | GPIO_Pin_14 | GPIO_Pin_15; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL; GPIO_Init(GPIOD, &GPIO_InitStructure); /* GPIOE configuration */ GPIO_PinAFConfig(GPIOE, GPIO_PinSource0 , GPIO_AF_FSMC); GPIO_PinAFConfig(GPIOE, GPIO_PinSource1 , GPIO_AF_FSMC); //GPIO_PinAFConfig(GPIOE, GPIO_PinSource2 , GPIO_AF_FSMC); //GPIO_PinAFConfig(GPIOE, GPIO_PinSource3 , GPIO_AF_FSMC); //GPIO_PinAFConfig(GPIOE, GPIO_PinSource4 , GPIO_AF_FSMC); //GPIO_PinAFConfig(GPIOE, GPIO_PinSource5 , GPIO_AF_FSMC); //GPIO_PinAFConfig(GPIOE, GPIO_PinSource6 , GPIO_AF_FSMC); GPIO_PinAFConfig(GPIOE, GPIO_PinSource7 , GPIO_AF_FSMC); GPIO_PinAFConfig(GPIOE, GPIO_PinSource8 , GPIO_AF_FSMC); GPIO_PinAFConfig(GPIOE, GPIO_PinSource9 , GPIO_AF_FSMC); GPIO_PinAFConfig(GPIOE, GPIO_PinSource10 , GPIO_AF_FSMC); GPIO_PinAFConfig(GPIOE, GPIO_PinSource11 , GPIO_AF_FSMC); GPIO_PinAFConfig(GPIOE, GPIO_PinSource12 , GPIO_AF_FSMC); GPIO_PinAFConfig(GPIOE, GPIO_PinSource13 , GPIO_AF_FSMC); GPIO_PinAFConfig(GPIOE, GPIO_PinSource14 , GPIO_AF_FSMC); GPIO_PinAFConfig(GPIOE, GPIO_PinSource15 , GPIO_AF_FSMC); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1 | //GPIO_Pin_2 | GPIO_Pin_3 | GPIO_Pin_4 | GPIO_Pin_5 | GPIO_Pin_6 | GPIO_Pin_7 | GPIO_Pin_8 | GPIO_Pin_9 | GPIO_Pin_10 | GPIO_Pin_11 | GPIO_Pin_12 | GPIO_Pin_13 | GPIO_Pin_14 | GPIO_Pin_15; GPIO_Init(GPIOE, &GPIO_InitStructure); /* GPIOF configuration */ GPIO_PinAFConfig(GPIOF, GPIO_PinSource0 , GPIO_AF_FSMC); GPIO_PinAFConfig(GPIOF, GPIO_PinSource1 , GPIO_AF_FSMC); GPIO_PinAFConfig(GPIOF, GPIO_PinSource2 , GPIO_AF_FSMC); GPIO_PinAFConfig(GPIOF, GPIO_PinSource3 , GPIO_AF_FSMC); GPIO_PinAFConfig(GPIOF, GPIO_PinSource4 , GPIO_AF_FSMC); GPIO_PinAFConfig(GPIOF, GPIO_PinSource5 , GPIO_AF_FSMC); GPIO_PinAFConfig(GPIOF, GPIO_PinSource12 , GPIO_AF_FSMC); GPIO_PinAFConfig(GPIOF, GPIO_PinSource13 , GPIO_AF_FSMC); GPIO_PinAFConfig(GPIOF, GPIO_PinSource14 , GPIO_AF_FSMC); GPIO_PinAFConfig(GPIOF, GPIO_PinSource15 , GPIO_AF_FSMC); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1 | GPIO_Pin_2 | GPIO_Pin_3 | GPIO_Pin_4 | GPIO_Pin_5 | GPIO_Pin_12 | GPIO_Pin_13 | GPIO_Pin_14 | GPIO_Pin_15; GPIO_Init(GPIOF, &GPIO_InitStructure); /* GPIOG configuration */ GPIO_PinAFConfig(GPIOG, GPIO_PinSource0 , GPIO_AF_FSMC); GPIO_PinAFConfig(GPIOG, GPIO_PinSource1 , GPIO_AF_FSMC); GPIO_PinAFConfig(GPIOG, GPIO_PinSource2 , GPIO_AF_FSMC); GPIO_PinAFConfig(GPIOG, GPIO_PinSource3 , GPIO_AF_FSMC); GPIO_PinAFConfig(GPIOG, GPIO_PinSource4 , GPIO_AF_FSMC); GPIO_PinAFConfig(GPIOG, GPIO_PinSource5 , GPIO_AF_FSMC); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1 | GPIO_Pin_2 | GPIO_Pin_3 | GPIO_Pin_4 | GPIO_Pin_5 ; GPIO_Init(GPIOG, &GPIO_InitStructure);/*-- FSMC Configuration ------------------------------------------------------*/ p.FSMC_AddressSetupTime = 6; p.FSMC_AddressHoldTime = 3; p.FSMC_DataSetupTime = 6; p.FSMC_BusTurnAroundDuration = 0x1; p.FSMC_CLKDivision = 0; p.FSMC_DataLatency = 0; p.FSMC_AccessMode = FSMC_AccessMode_A; FSMC_NORSRAMInitStructure.FSMC_Bank = FSMC_Bank1_NORSRAM1; FSMC_NORSRAMInitStructure.FSMC_DataAddressMux = FSMC_DataAddressMux_Disable; FSMC_NORSRAMInitStructure.FSMC_MemoryType = FSMC_MemoryType_SRAM; FSMC_NORSRAMInitStructure.FSMC_MemoryDataWidth = FSMC_MemoryDataWidth_16b; FSMC_NORSRAMInitStructure.FSMC_burstAccessMode = FSMC_BurstAccessMode_Disable; FSMC_NORSRAMInitStructure.FSMC_AsynchronousWait = FSMC_AsynchronousWait_Disable; FSMC_NORSRAMInitStructure.FSMC_WaitSignalPolarity = FSMC_WaitSignalPolarity_Low; FSMC_NORSRAMInitStructure.FSMC_WrapMode = FSMC_WrapMode_Disable; FSMC_NORSRAMInitStructure.FSMC_WaitSignalActive = FSMC_WaitSignalActive_BeforeWaitState; FSMC_NORSRAMInitStructure.FSMC_WriteOperation = FSMC_WriteOperation_Enable; FSMC_NORSRAMInitStructure.FSMC_WaitSignal = FSMC_WaitSignal_Disable; FSMC_NORSRAMInitStructure.FSMC_ExtendedMode = FSMC_ExtendedMode_Disable; FSMC_NORSRAMInitStructure.FSMC_WriteBurst = FSMC_WriteBurst_Disable; FSMC_NORSRAMInitStructure.FSMC_ReadWriteTimingStruct = &p; FSMC_NORSRAMInitStructure.FSMC_WriteTimingStruct = &p; FSMC_NORSRAMInit(&FSMC_NORSRAMInitStructure); FSMC_NORSRAMCmd(FSMC_Bank1_NORSRAM1, ENABLE); }uint32_t SRAM_Test(void){ uint32_t NumHalfwordToWrite=0,Errtimes=0; uint32_t WriteAddr=0; uint32_t ReadAddr; uint16_t Buffer; for (NumHalfwordToWrite=0; NumHalfwordToWrite
-
杨美娟 2020-03-27你的外扩sram逆时针旋转90度你的电路就会好很多,目前就降低外部总线频率使用(常用数据或参与大规模运算的数据使用内部sram)。同时你的sram是10ns的,所以你要关注一下下面几个值的设计(与你设计的sram使用的频率有关,所以不好直接给出结果), p.FSMC_AddressSetupTime = 6; p.FSMC_AddressHoldTime = 3; p.FSMC_DataSetupTime = 6; p.FSMC_BusTurnAroundDuration = 0x1; p.FSMC_CLKDivision = 0; p.FSMC_DataLatency = 0; 你可以考虑使用示波器分析一下总线驱动速度。












-
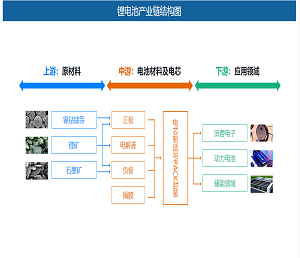
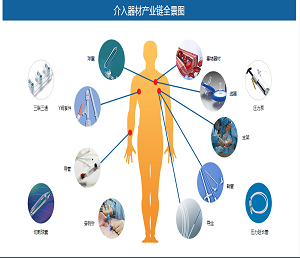
产业创新资源配置系统
数字化展示产业全景图,并根据产业节点匹配展示相关的创新资源,为用户的产业创新决策提供支撑参考。
[政府园区]
-
科创项目落地配置系统
围绕科技项目落地的关联要素,进行多维要素的深度研究,构建多要素交叉配置模型,并应用自然语言、知识图谱等新技术,实现科技项目与产业、园区、企业、政策等要素的交叉配置,提供落地配置方案,促进项目落地。
[政府园区]
-
核心系统
基于多元化市场需求,研发多样化、实用性软件系统,为区域科技创新提供强有力帮手。
[政府园区]
-
高校成果转化解决方案
促进高校、科研院所等的科技成果、技术能力向产业、企业进行转移转化与应用 服务对象:高等学校、科研院所、大型企业
[高校院所]
-
科创金融汇
对有融资需求的技术项目团队提供融资服务,精准对接产业基金、风投基金,让好的项目不再为融资难发愁。
[企业服务]
-
技术情报库
技术情报库为企业提供技术类项目的订制化资讯,帮助企业了解行业动态、社会舆情、行业技术最新方向、科研人才以及科技政策等各类技术情报资讯。助力企业科学决策、技术创新、产业布局!
[企业服务]