找到162项技术成果数据。
找技术 >
平面两自由度双向可逆连杆式集装箱正面吊运起重机
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
摘要:本发明公开了一种平面两自由度双向可逆连杆式集装箱正面吊运起重机,包括车架,吊臂、吊臂转动机构和吊臂伸缩机构,其中,吊臂包括可伸缩连接的转动臂和伸缩臂,转动臂的臂体上安装有相对于其可滑动的滑块,伸缩臂远离转动臂的一端上安装夹紧装置;吊臂转动机构包括位于转动臂两侧且对称的两转动装置,转动装置包括依次铰接的前摇杆、后摇杆和连杆;吊臂伸缩机构包括位于吊臂两侧且对称设置的两伸缩装置,伸缩装置包括伸缩摇杆和伸缩连杆,伸缩摇杆下端与车架的中部铰连,上端与伸缩连杆的下端铰连,伸缩连杆的两端分别与伸缩臂和伸缩摇杆铰连。本起重起机在控制维护和保养成本的同时,消除了起重机的冗余行车路线,其输出轨迹灵活多变。

一种具有五自由度的塑件抓取机械手
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
本发明提供了一种具有五自由度的塑件抓取机械手,所述塑件抓取机械手包括机身、机械臂和机械手,所述机械臂包括主臂和副臂,所述主臂包括由受力板、保持架和连接架,构成具有水平移动自由度的一平面框架,所述副臂包括副臂杆、滑块导轨和副臂气缸,具有竖直方向移动的自由度;所述机身包括底座和机械臂支撑架,所述机械臂支撑架上设有摇杆机构;所述机械手包括抓取机构和腕部回转气缸,所述腕部回转气缸带动所述夹头相对所述机械臂旋转,使所述机械手具有第二旋转自由度。本发明提供的一种具有五自由度的塑件抓取机械手,质量轻,装配精度高,注塑取件过程中能够准确抓取塑件,工作稳定。

一种五自由度外骨骼式上肢康复机器人
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
p 摘要:本发明公开了一种五自由度外骨骼式上肢康复机器人,包括上肩关节旋转组件、上臂旋转组件、肘关节屈伸组件、前臂旋转组件、腕关节屈伸组件、手臂整体旋转组件和手臂整体高度调节箱;上肩关节旋转组件与上臂旋转组件连接;上臂旋转组件与肘关节屈伸组件连接;肘关节屈伸组件与前臂旋转组件连接;前臂旋转组件与腕关节屈伸组件连接;手臂整体旋转组件与上肩关节旋转组件连接;手臂整体旋转组件固定在手臂整体高度调节箱上。该机器人能够实现肩关节的旋转、上臂的内旋外旋、肘关节的屈伸、前臂的内旋外旋和腕关节的屈伸五个自由度的运动以及手臂竖直方向高度调整一个自由度的运动,提高康复运动的科学性、灵活性、有效性。 /p
一种仿人机器人的躯体机构
成熟度:正在研发
技术类型:实用新型
应用行业:交通运输、仓储和邮政业
技术简介
摘要:本实用新型公开了一种仿人机器人的躯体机构,包括一个带1自由度颈部的5自由度头部、两条3自由度手臂、1自由度腰部、两条6自由度腿;5自由度头部用来支持双目立体视觉,每只眼睛均具有2自由度;1自由度颈部能够绕垂直轴转动;每条3自由度手臂的每个肩关节均有2个自由度,每条手臂的肘关节处均有1个自由度;腰部有1个自由度,使得仿人机器人的上身能够绕竖直方向即Z轴在水平面上左右转动躯干;每条6个自由度腿的脚踝处均有2个自由度,每条腿的膝盖均有1个自由度,每个髋部均有3个自由度。本实用新型所述仿人机器人的躯体机构及其自由度不仅能够满足仿人机器人的作业要求,而且能减少仿人机器人的控制复杂度,以及提高仿人机器人的控制精度。
一种用于重型构件运输和安装的六自由度重载车辆
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
摘要:本发明公开一种用于重型构件运输和安装的六自由度重载车辆,包括U型车架和托架平台,托架平台设于U型车架上,U型车架底部设有行走轮机构,托架平台上设有Y轴平移机构和XZ平面旋转机构,托架平移与U型车架之间设有Z轴平移机构,U型车架上设有X轴平移机构、XY平面旋转机构和YZ平面旋转机构。本六自由度重载车辆不仅能在狭窄的空间内进行多方向运输,还能在X轴平移、Y轴平移、Z轴平移、俯仰角度、旋转角度和翻滚角度多维微调的情况下进行精确定位安装,相比于该类传统运输车,能够实现更迅速更准确的多角度运输,避免倒车判定,行车轨迹的考虑,极大提高了桥梁运输效率,缩短运输时间,社会效益明显。
完全重力平衡的6自由度串联式主手机器人
成熟度:正在研发
技术类型:-
应用行业:制造业
技术简介
p 成果与项目的背景及主要用途:近二十年来,机器人技术发展非常迅速,各种用途的机器人在各个领域广泛获 得应用。但我国在机器人的研究和应用方面与工业化国家相比还有一定的差距, 因此研究和设计各种用途的机器人特别是工业机器人、推广机器人的应用是很有 现实意义的。在工业机器人的实际应用中,串联机器人应用最为普遍,已经广泛的 应用于生产中的机械加工、焊接、热处理、表面涂覆、上下料、装配等作业。技术原理与工艺流程简介:一种完全重力平衡的6自由度串联式主手机器人:分别固定在基座上的第一 关节驱动电机和第一关节轴;第一关节丝盘,通过回转副可旋转的连接在第一关 节轴的下端,所述的第一关节驱动电机的输出轴通过传动丝连接第一关节丝盘;两个吊架,分别固定连接在第一关节丝盘底部端面上的两侧;大臂关节轴,该大 臂关节轴的两端部分别对称的固定在所述的两个吊架下端部;第二、三关节丝盘, 该第二、三关节丝盘的回转中心固定连接在大臂关节轴上;平行四边形驱动机构, 该平行四边形驱动机构可旋转的连接在大臂关节轴上,且底部连接腕部机构。本 项目能够实现6自由度力感机器人的完全重力平衡,满足力雅克比方程成立条件, 使主手机器人具有良好的静态透明性,提高力感精度。应用前景分析及效益预测:全球工业机器人需求量保持在一个很高的水平,主要应用在汽车整车、汽车 零部件、电子电气和化工、橡胶和塑料等领域,占比高达60%。根据国际机器人 联合会(IFR)统计,国际机器人市场于2010年开始恢复性增长,其中工业机器 人在2011年的全球市场销量为16.6万台,销售额255亿美元。2011年中国工业 机器人销量达22600万台,位居世界工业机器人销量排名第三位,仅次于日本、 韩国。据IFR估计,中国未来的工业机器人市场年需求量约为100万台,将成为 世界最大的工业机器人市场。该六自由度串联机器人,可应用在焊接、搬运与装 卸、涂漆、表面处理、切割等多个领域,应用前景巨大。应用领域:焊接、搬运与装卸、涂漆、表面处理、切割等行业技术转化条件(包括:原料、设备、厂房面积的要求及投资规模):按需要可购置国产设备或国外设备、厂房面积1500〜5000m2、具体厂房面积 和投资规模可视企业的情况和产品的批量规模而定。合作方式及条件:合作方式可采取技术转让或协商。 /p
微创全膝关节置换手术机器人
成熟度:-
技术类型:-
应用行业:制造业
技术简介
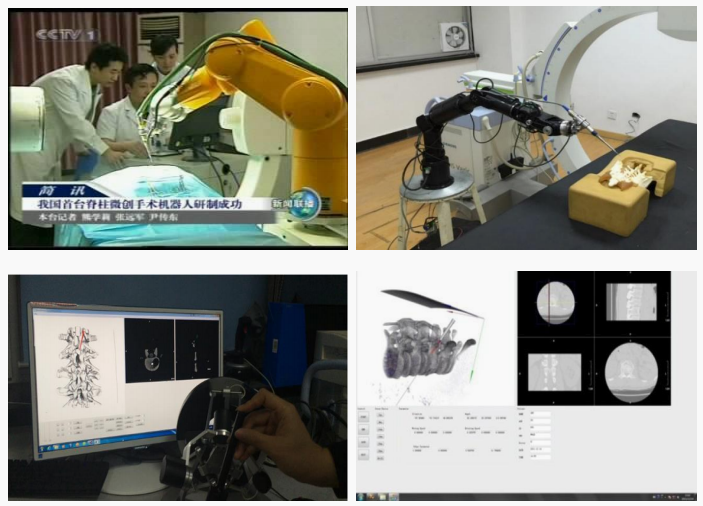
项目简介: 项目针对术前、术中、术后全周期的 MIS-TKA 机器人综合解决 方案,突破柔顺 7 自由度机械臂与精细操作 2 自由度末端执行器,个 性化虚拟导板以及安全手术操控技术,基于图像配准的增强现实手术 导航技术,术中下肢力线定量检测与修正、以及个性化术后评估技术; 研制出具有术前规划、术中导航与机器人操控、术后评估、以及安全 保障的专科型 MIS-TKA 机器人样机系统,建立 MIS-TKA 机器人手 术流程规范与安全、有效性评估体系。 项目特色: 膝关节损伤是骨科学的主要组成部分,且由于其周围毗邻重要神 经、血管,不恰当的手术操作往往会导致严重后果。微创全膝关节置 换技术手术创伤小,术后恢复快,深受患者好评。但该技术严重限制了手术切口,手术视野小、操作空间窄、骨性标志显露差对医生提出 了更高的要求。本项目从微创全膝关节置换手术外科临床出发,针对 术前、术中、术后三个阶段提出智能化、机器人化手术方案,将微创 精准 TKA 手术提升到智能化水平,推动 TKA 机器人手术技术、TKA 导航技术、TKA 术前规划和术后评估技术、以及智能化手术系统集 成技术的进一步发展,为后续临床验证、产品化奠定坚实的技术基础。 已取得的成果: 已成功研制出脊柱微创手术机器人系统,并开展临床试验(如下图)。
一种三自由度混联码垛机械手
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
介绍 一种三自由度混联码垛机械手,包括机架、转台、大臂、小臂、法兰、第一直线驱动器、第二直线驱动器和第三直线驱动器。所述机架、转台、大臂、第一直线驱动器和第二直线驱动器联接成一个两自由度的并联机构。所述法兰和小臂串联在大臂上,并由联接在大臂上的第三直线驱动器驱动运动。本实用新型结构简单,机构自身运动质量轻、刚性好、惯性小、动力学性能好,与同类产品相比具有负载能力强的特点。 将具有高刚度、高精度、高负载能力的并联机构引入码垛机械手的设计之中,采用2-UPS/U并联机构实现码垛机械手大臂摆转与俯仰运动,在大臂上串联一个小臂,此构型能有效解决现有串联码垛机械手误差累积、刚度差的问题。 正文 技术领域 本实用新型涉及工业机器人领域,特别是一种三自由度混联码垛机械手。 背景技术 码垛机器人广泛应用于机床上下料、冲压机自动化生产线、自动装配流水线、搬运码垛、集装箱等的自动搬运作业当中。现有的码垛机器人主要有直角坐标型、圆柱坐标型以及关节型等结构类型。其中关节型码垛机器人因其机构紧凑、动作灵活、占地面积小、工作空间大等优点,已逐步成为码垛机器人最主要的结构形式。但这类传统开链式串联结构的码垛机器人的驱动电机都需要安装在关节处,导致机器人手臂重量大、刚性差、惯量大、关节误差累积等问题,机构动力学性能较差,难以满足高速重载搬运码垛的要求。并联机构是一种动平台和定平台通过至少两个独立的运动链相连接,有两个或两个以上自由度,且以并联方式驱动的机构。因其具有精度高、结构紧凑、刚度高、承载能力强等优点,引起了国内外众多专家学者的关注,相关研究取得了丰硕的成果,在运动模拟器、并联机床、微操作机器人等方面取得了较好的应用。但并联机构也存在工作空间小的缺点,因此很难满足实际码垛的需求。本实用新型采用混联结构实现机器人码垛运动,能解决传统开链结构误差累计大、刚性差和并联机构工作空间小的问题。 发明内容 本实用新型的目的在于提供一种三自由度混联码垛机械手,可有效提高现有码垛机械手的负载能力。 本实用新型通过以下技术方案达到上述目的:一种三自由度混联码垛机械手包括机架、转台、大臂、小臂、法兰、第一直线驱动器、第二直线驱动器和第三直线驱动器。 所述转台通过第一转动副与机架联接,大臂通过第二转动副与转台联接,小臂通过第三转动副与大臂联接,法兰固结在小臂上,第一直线驱动器一端通过第一虎克铰与机架联接,第一直线驱动器另一端通过第一球铰与大臂联接,第二驱动器一端通过第二虎克铰与机架联接,第二驱动器另一端通过第二球铰与大臂联接,第三直线驱动器一端通过第四转动副与大臂联接,第三直线驱动器另一端通过第五转动副与小臂联接。 本实用新型的突出优点在于: 1、采用混联结构,杆件做成轻杆,机构重量轻、刚性好; 2、机械手惯量小、运动学与动力学性能好; 3、法兰上安装不同的末端执行器,本机构可应用到装配、焊接、激光、医用等领域。
六自由度脊柱手术导引器
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
一种六自由度脊柱手术导引器,包括支撑机构、定位机构以及六自由度并联姿态调整机构,所述六自由度并联姿态调整机构固定于定位机构上,所述六自由度并联姿态调整机构包括上平台、下平台、六个直线副、伸缩杆以及操作套筒,所述六个直线副以两个为一组沿上平台以及下平台均匀设置,每个直线副的上端通过一球形副与上平台连接,每个直线副的下端通过一球形副与下平台连接,所述伸缩杆与所述上平台固定,并向下倾斜延伸后与所述操作套筒连接。上述六自由度脊柱手术导引器,通过支撑机构来支撑姿态调整机构的重量,通过定位机构对人体脊柱的脊凸部分进行定位,由姿态调整机构对不同脊椎段的椎弓根钉道姿态和位置调整和定位,使钉道姿态和位置更精确,更安全可靠。
平面双滑块并联机构二自由度粘片机焊头结构及动作过程
成熟度:正在研发
技术类型:-
应用行业:制造业
技术简介
本发明公开了一种平面双滑块并联机构二自由度粘片机焊头结构及动作过程,该粘片机焊头结构的导轨安装固定在机架上,两个驱动单元分别驱动左右两个滑块沿导轨作往复直线移动,通过三组连杆使两个滑块同焊头座铰接起来,两滑块的移动合成焊头座在工作平面的曲线和直线运动,焊头座上安装有焊头吸嘴,完成焊头吸嘴在拾片点拾取晶片、传送晶片和在多个粘片点粘焊晶片的动作,并且具有多粘片点的粘焊功能,该焊头结构具有相对独立性,在一定的工作范围,通过改改变程序就能适用于不同粘片机的应用场合。





找到162项技术成果数据。
找技术 >平面两自由度双向可逆连杆式集装箱正面吊运起重机
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
摘要:本发明公开了一种平面两自由度双向可逆连杆式集装箱正面吊运起重机,包括车架,吊臂、吊臂转动机构和吊臂伸缩机构,其中,吊臂包括可伸缩连接的转动臂和伸缩臂,转动臂的臂体上安装有相对于其可滑动的滑块,伸缩臂远离转动臂的一端上安装夹紧装置;吊臂转动机构包括位于转动臂两侧且对称的两转动装置,转动装置包括依次铰接的前摇杆、后摇杆和连杆;吊臂伸缩机构包括位于吊臂两侧且对称设置的两伸缩装置,伸缩装置包括伸缩摇杆和伸缩连杆,伸缩摇杆下端与车架的中部铰连,上端与伸缩连杆的下端铰连,伸缩连杆的两端分别与伸缩臂和伸缩摇杆铰连。本起重起机在控制维护和保养成本的同时,消除了起重机的冗余行车路线,其输出轨迹灵活多变。
一种具有五自由度的塑件抓取机械手
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
本发明提供了一种具有五自由度的塑件抓取机械手,所述塑件抓取机械手包括机身、机械臂和机械手,所述机械臂包括主臂和副臂,所述主臂包括由受力板、保持架和连接架,构成具有水平移动自由度的一平面框架,所述副臂包括副臂杆、滑块导轨和副臂气缸,具有竖直方向移动的自由度;所述机身包括底座和机械臂支撑架,所述机械臂支撑架上设有摇杆机构;所述机械手包括抓取机构和腕部回转气缸,所述腕部回转气缸带动所述夹头相对所述机械臂旋转,使所述机械手具有第二旋转自由度。本发明提供的一种具有五自由度的塑件抓取机械手,质量轻,装配精度高,注塑取件过程中能够准确抓取塑件,工作稳定。
一种五自由度外骨骼式上肢康复机器人
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
p 摘要:本发明公开了一种五自由度外骨骼式上肢康复机器人,包括上肩关节旋转组件、上臂旋转组件、肘关节屈伸组件、前臂旋转组件、腕关节屈伸组件、手臂整体旋转组件和手臂整体高度调节箱;上肩关节旋转组件与上臂旋转组件连接;上臂旋转组件与肘关节屈伸组件连接;肘关节屈伸组件与前臂旋转组件连接;前臂旋转组件与腕关节屈伸组件连接;手臂整体旋转组件与上肩关节旋转组件连接;手臂整体旋转组件固定在手臂整体高度调节箱上。该机器人能够实现肩关节的旋转、上臂的内旋外旋、肘关节的屈伸、前臂的内旋外旋和腕关节的屈伸五个自由度的运动以及手臂竖直方向高度调整一个自由度的运动,提高康复运动的科学性、灵活性、有效性。 /p
一种仿人机器人的躯体机构
成熟度:正在研发
技术类型:实用新型
应用行业:交通运输、仓储和邮政业
技术简介
摘要:本实用新型公开了一种仿人机器人的躯体机构,包括一个带1自由度颈部的5自由度头部、两条3自由度手臂、1自由度腰部、两条6自由度腿;5自由度头部用来支持双目立体视觉,每只眼睛均具有2自由度;1自由度颈部能够绕垂直轴转动;每条3自由度手臂的每个肩关节均有2个自由度,每条手臂的肘关节处均有1个自由度;腰部有1个自由度,使得仿人机器人的上身能够绕竖直方向即Z轴在水平面上左右转动躯干;每条6个自由度腿的脚踝处均有2个自由度,每条腿的膝盖均有1个自由度,每个髋部均有3个自由度。本实用新型所述仿人机器人的躯体机构及其自由度不仅能够满足仿人机器人的作业要求,而且能减少仿人机器人的控制复杂度,以及提高仿人机器人的控制精度。
一种用于重型构件运输和安装的六自由度重载车辆
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
摘要:本发明公开一种用于重型构件运输和安装的六自由度重载车辆,包括U型车架和托架平台,托架平台设于U型车架上,U型车架底部设有行走轮机构,托架平台上设有Y轴平移机构和XZ平面旋转机构,托架平移与U型车架之间设有Z轴平移机构,U型车架上设有X轴平移机构、XY平面旋转机构和YZ平面旋转机构。本六自由度重载车辆不仅能在狭窄的空间内进行多方向运输,还能在X轴平移、Y轴平移、Z轴平移、俯仰角度、旋转角度和翻滚角度多维微调的情况下进行精确定位安装,相比于该类传统运输车,能够实现更迅速更准确的多角度运输,避免倒车判定,行车轨迹的考虑,极大提高了桥梁运输效率,缩短运输时间,社会效益明显。
完全重力平衡的6自由度串联式主手机器人
成熟度:正在研发
技术类型:-
应用行业:制造业
技术简介
p 成果与项目的背景及主要用途:近二十年来,机器人技术发展非常迅速,各种用途的机器人在各个领域广泛获 得应用。但我国在机器人的研究和应用方面与工业化国家相比还有一定的差距, 因此研究和设计各种用途的机器人特别是工业机器人、推广机器人的应用是很有 现实意义的。在工业机器人的实际应用中,串联机器人应用最为普遍,已经广泛的 应用于生产中的机械加工、焊接、热处理、表面涂覆、上下料、装配等作业。技术原理与工艺流程简介:一种完全重力平衡的6自由度串联式主手机器人:分别固定在基座上的第一 关节驱动电机和第一关节轴;第一关节丝盘,通过回转副可旋转的连接在第一关 节轴的下端,所述的第一关节驱动电机的输出轴通过传动丝连接第一关节丝盘;两个吊架,分别固定连接在第一关节丝盘底部端面上的两侧;大臂关节轴,该大 臂关节轴的两端部分别对称的固定在所述的两个吊架下端部;第二、三关节丝盘, 该第二、三关节丝盘的回转中心固定连接在大臂关节轴上;平行四边形驱动机构, 该平行四边形驱动机构可旋转的连接在大臂关节轴上,且底部连接腕部机构。本 项目能够实现6自由度力感机器人的完全重力平衡,满足力雅克比方程成立条件, 使主手机器人具有良好的静态透明性,提高力感精度。应用前景分析及效益预测:全球工业机器人需求量保持在一个很高的水平,主要应用在汽车整车、汽车 零部件、电子电气和化工、橡胶和塑料等领域,占比高达60%。根据国际机器人 联合会(IFR)统计,国际机器人市场于2010年开始恢复性增长,其中工业机器 人在2011年的全球市场销量为16.6万台,销售额255亿美元。2011年中国工业 机器人销量达22600万台,位居世界工业机器人销量排名第三位,仅次于日本、 韩国。据IFR估计,中国未来的工业机器人市场年需求量约为100万台,将成为 世界最大的工业机器人市场。该六自由度串联机器人,可应用在焊接、搬运与装 卸、涂漆、表面处理、切割等多个领域,应用前景巨大。应用领域:焊接、搬运与装卸、涂漆、表面处理、切割等行业技术转化条件(包括:原料、设备、厂房面积的要求及投资规模):按需要可购置国产设备或国外设备、厂房面积1500〜5000m2、具体厂房面积 和投资规模可视企业的情况和产品的批量规模而定。合作方式及条件:合作方式可采取技术转让或协商。 /p
微创全膝关节置换手术机器人
成熟度:-
技术类型:-
应用行业:制造业
技术简介
项目简介: 项目针对术前、术中、术后全周期的 MIS-TKA 机器人综合解决 方案,突破柔顺 7 自由度机械臂与精细操作 2 自由度末端执行器,个 性化虚拟导板以及安全手术操控技术,基于图像配准的增强现实手术 导航技术,术中下肢力线定量检测与修正、以及个性化术后评估技术; 研制出具有术前规划、术中导航与机器人操控、术后评估、以及安全 保障的专科型 MIS-TKA 机器人样机系统,建立 MIS-TKA 机器人手 术流程规范与安全、有效性评估体系。 项目特色: 膝关节损伤是骨科学的主要组成部分,且由于其周围毗邻重要神 经、血管,不恰当的手术操作往往会导致严重后果。微创全膝关节置 换技术手术创伤小,术后恢复快,深受患者好评。但该技术严重限制了手术切口,手术视野小、操作空间窄、骨性标志显露差对医生提出 了更高的要求。本项目从微创全膝关节置换手术外科临床出发,针对 术前、术中、术后三个阶段提出智能化、机器人化手术方案,将微创 精准 TKA 手术提升到智能化水平,推动 TKA 机器人手术技术、TKA 导航技术、TKA 术前规划和术后评估技术、以及智能化手术系统集 成技术的进一步发展,为后续临床验证、产品化奠定坚实的技术基础。 已取得的成果: 已成功研制出脊柱微创手术机器人系统,并开展临床试验(如下图)。
一种三自由度混联码垛机械手
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
介绍 一种三自由度混联码垛机械手,包括机架、转台、大臂、小臂、法兰、第一直线驱动器、第二直线驱动器和第三直线驱动器。所述机架、转台、大臂、第一直线驱动器和第二直线驱动器联接成一个两自由度的并联机构。所述法兰和小臂串联在大臂上,并由联接在大臂上的第三直线驱动器驱动运动。本实用新型结构简单,机构自身运动质量轻、刚性好、惯性小、动力学性能好,与同类产品相比具有负载能力强的特点。 将具有高刚度、高精度、高负载能力的并联机构引入码垛机械手的设计之中,采用2-UPS/U并联机构实现码垛机械手大臂摆转与俯仰运动,在大臂上串联一个小臂,此构型能有效解决现有串联码垛机械手误差累积、刚度差的问题。 正文 技术领域 本实用新型涉及工业机器人领域,特别是一种三自由度混联码垛机械手。 背景技术 码垛机器人广泛应用于机床上下料、冲压机自动化生产线、自动装配流水线、搬运码垛、集装箱等的自动搬运作业当中。现有的码垛机器人主要有直角坐标型、圆柱坐标型以及关节型等结构类型。其中关节型码垛机器人因其机构紧凑、动作灵活、占地面积小、工作空间大等优点,已逐步成为码垛机器人最主要的结构形式。但这类传统开链式串联结构的码垛机器人的驱动电机都需要安装在关节处,导致机器人手臂重量大、刚性差、惯量大、关节误差累积等问题,机构动力学性能较差,难以满足高速重载搬运码垛的要求。并联机构是一种动平台和定平台通过至少两个独立的运动链相连接,有两个或两个以上自由度,且以并联方式驱动的机构。因其具有精度高、结构紧凑、刚度高、承载能力强等优点,引起了国内外众多专家学者的关注,相关研究取得了丰硕的成果,在运动模拟器、并联机床、微操作机器人等方面取得了较好的应用。但并联机构也存在工作空间小的缺点,因此很难满足实际码垛的需求。本实用新型采用混联结构实现机器人码垛运动,能解决传统开链结构误差累计大、刚性差和并联机构工作空间小的问题。 发明内容 本实用新型的目的在于提供一种三自由度混联码垛机械手,可有效提高现有码垛机械手的负载能力。 本实用新型通过以下技术方案达到上述目的:一种三自由度混联码垛机械手包括机架、转台、大臂、小臂、法兰、第一直线驱动器、第二直线驱动器和第三直线驱动器。 所述转台通过第一转动副与机架联接,大臂通过第二转动副与转台联接,小臂通过第三转动副与大臂联接,法兰固结在小臂上,第一直线驱动器一端通过第一虎克铰与机架联接,第一直线驱动器另一端通过第一球铰与大臂联接,第二驱动器一端通过第二虎克铰与机架联接,第二驱动器另一端通过第二球铰与大臂联接,第三直线驱动器一端通过第四转动副与大臂联接,第三直线驱动器另一端通过第五转动副与小臂联接。 本实用新型的突出优点在于: 1、采用混联结构,杆件做成轻杆,机构重量轻、刚性好; 2、机械手惯量小、运动学与动力学性能好; 3、法兰上安装不同的末端执行器,本机构可应用到装配、焊接、激光、医用等领域。
六自由度脊柱手术导引器
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
一种六自由度脊柱手术导引器,包括支撑机构、定位机构以及六自由度并联姿态调整机构,所述六自由度并联姿态调整机构固定于定位机构上,所述六自由度并联姿态调整机构包括上平台、下平台、六个直线副、伸缩杆以及操作套筒,所述六个直线副以两个为一组沿上平台以及下平台均匀设置,每个直线副的上端通过一球形副与上平台连接,每个直线副的下端通过一球形副与下平台连接,所述伸缩杆与所述上平台固定,并向下倾斜延伸后与所述操作套筒连接。上述六自由度脊柱手术导引器,通过支撑机构来支撑姿态调整机构的重量,通过定位机构对人体脊柱的脊凸部分进行定位,由姿态调整机构对不同脊椎段的椎弓根钉道姿态和位置调整和定位,使钉道姿态和位置更精确,更安全可靠。
平面双滑块并联机构二自由度粘片机焊头结构及动作过程
成熟度:正在研发
技术类型:-
应用行业:制造业
技术简介
本发明公开了一种平面双滑块并联机构二自由度粘片机焊头结构及动作过程,该粘片机焊头结构的导轨安装固定在机架上,两个驱动单元分别驱动左右两个滑块沿导轨作往复直线移动,通过三组连杆使两个滑块同焊头座铰接起来,两滑块的移动合成焊头座在工作平面的曲线和直线运动,焊头座上安装有焊头吸嘴,完成焊头吸嘴在拾片点拾取晶片、传送晶片和在多个粘片点粘焊晶片的动作,并且具有多粘片点的粘焊功能,该焊头结构具有相对独立性,在一定的工作范围,通过改改变程序就能适用于不同粘片机的应用场合。
找到162项技术成果数据。
找技术 >平面两自由度双向可逆连杆式集装箱正面吊运起重机
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
摘要:本发明公开了一种平面两自由度双向可逆连杆式集装箱正面吊运起重机,包括车架,吊臂、吊臂转动机构和吊臂伸缩机构,其中,吊臂包括可伸缩连接的转动臂和伸缩臂,转动臂的臂体上安装有相对于其可滑动的滑块,伸缩臂远离转动臂的一端上安装夹紧装置;吊臂转动机构包括位于转动臂两侧且对称的两转动装置,转动装置包括依次铰接的前摇杆、后摇杆和连杆;吊臂伸缩机构包括位于吊臂两侧且对称设置的两伸缩装置,伸缩装置包括伸缩摇杆和伸缩连杆,伸缩摇杆下端与车架的中部铰连,上端与伸缩连杆的下端铰连,伸缩连杆的两端分别与伸缩臂和伸缩摇杆铰连。本起重起机在控制维护和保养成本的同时,消除了起重机的冗余行车路线,其输出轨迹灵活多变。
一种具有五自由度的塑件抓取机械手
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
本发明提供了一种具有五自由度的塑件抓取机械手,所述塑件抓取机械手包括机身、机械臂和机械手,所述机械臂包括主臂和副臂,所述主臂包括由受力板、保持架和连接架,构成具有水平移动自由度的一平面框架,所述副臂包括副臂杆、滑块导轨和副臂气缸,具有竖直方向移动的自由度;所述机身包括底座和机械臂支撑架,所述机械臂支撑架上设有摇杆机构;所述机械手包括抓取机构和腕部回转气缸,所述腕部回转气缸带动所述夹头相对所述机械臂旋转,使所述机械手具有第二旋转自由度。本发明提供的一种具有五自由度的塑件抓取机械手,质量轻,装配精度高,注塑取件过程中能够准确抓取塑件,工作稳定。
一种五自由度外骨骼式上肢康复机器人
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
p 摘要:本发明公开了一种五自由度外骨骼式上肢康复机器人,包括上肩关节旋转组件、上臂旋转组件、肘关节屈伸组件、前臂旋转组件、腕关节屈伸组件、手臂整体旋转组件和手臂整体高度调节箱;上肩关节旋转组件与上臂旋转组件连接;上臂旋转组件与肘关节屈伸组件连接;肘关节屈伸组件与前臂旋转组件连接;前臂旋转组件与腕关节屈伸组件连接;手臂整体旋转组件与上肩关节旋转组件连接;手臂整体旋转组件固定在手臂整体高度调节箱上。该机器人能够实现肩关节的旋转、上臂的内旋外旋、肘关节的屈伸、前臂的内旋外旋和腕关节的屈伸五个自由度的运动以及手臂竖直方向高度调整一个自由度的运动,提高康复运动的科学性、灵活性、有效性。 /p
一种仿人机器人的躯体机构
成熟度:正在研发
技术类型:实用新型
应用行业:交通运输、仓储和邮政业
技术简介
摘要:本实用新型公开了一种仿人机器人的躯体机构,包括一个带1自由度颈部的5自由度头部、两条3自由度手臂、1自由度腰部、两条6自由度腿;5自由度头部用来支持双目立体视觉,每只眼睛均具有2自由度;1自由度颈部能够绕垂直轴转动;每条3自由度手臂的每个肩关节均有2个自由度,每条手臂的肘关节处均有1个自由度;腰部有1个自由度,使得仿人机器人的上身能够绕竖直方向即Z轴在水平面上左右转动躯干;每条6个自由度腿的脚踝处均有2个自由度,每条腿的膝盖均有1个自由度,每个髋部均有3个自由度。本实用新型所述仿人机器人的躯体机构及其自由度不仅能够满足仿人机器人的作业要求,而且能减少仿人机器人的控制复杂度,以及提高仿人机器人的控制精度。
一种用于重型构件运输和安装的六自由度重载车辆
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
摘要:本发明公开一种用于重型构件运输和安装的六自由度重载车辆,包括U型车架和托架平台,托架平台设于U型车架上,U型车架底部设有行走轮机构,托架平台上设有Y轴平移机构和XZ平面旋转机构,托架平移与U型车架之间设有Z轴平移机构,U型车架上设有X轴平移机构、XY平面旋转机构和YZ平面旋转机构。本六自由度重载车辆不仅能在狭窄的空间内进行多方向运输,还能在X轴平移、Y轴平移、Z轴平移、俯仰角度、旋转角度和翻滚角度多维微调的情况下进行精确定位安装,相比于该类传统运输车,能够实现更迅速更准确的多角度运输,避免倒车判定,行车轨迹的考虑,极大提高了桥梁运输效率,缩短运输时间,社会效益明显。
完全重力平衡的6自由度串联式主手机器人
成熟度:正在研发
技术类型:-
应用行业:制造业
技术简介
p 成果与项目的背景及主要用途:近二十年来,机器人技术发展非常迅速,各种用途的机器人在各个领域广泛获 得应用。但我国在机器人的研究和应用方面与工业化国家相比还有一定的差距, 因此研究和设计各种用途的机器人特别是工业机器人、推广机器人的应用是很有 现实意义的。在工业机器人的实际应用中,串联机器人应用最为普遍,已经广泛的 应用于生产中的机械加工、焊接、热处理、表面涂覆、上下料、装配等作业。技术原理与工艺流程简介:一种完全重力平衡的6自由度串联式主手机器人:分别固定在基座上的第一 关节驱动电机和第一关节轴;第一关节丝盘,通过回转副可旋转的连接在第一关 节轴的下端,所述的第一关节驱动电机的输出轴通过传动丝连接第一关节丝盘;两个吊架,分别固定连接在第一关节丝盘底部端面上的两侧;大臂关节轴,该大 臂关节轴的两端部分别对称的固定在所述的两个吊架下端部;第二、三关节丝盘, 该第二、三关节丝盘的回转中心固定连接在大臂关节轴上;平行四边形驱动机构, 该平行四边形驱动机构可旋转的连接在大臂关节轴上,且底部连接腕部机构。本 项目能够实现6自由度力感机器人的完全重力平衡,满足力雅克比方程成立条件, 使主手机器人具有良好的静态透明性,提高力感精度。应用前景分析及效益预测:全球工业机器人需求量保持在一个很高的水平,主要应用在汽车整车、汽车 零部件、电子电气和化工、橡胶和塑料等领域,占比高达60%。根据国际机器人 联合会(IFR)统计,国际机器人市场于2010年开始恢复性增长,其中工业机器 人在2011年的全球市场销量为16.6万台,销售额255亿美元。2011年中国工业 机器人销量达22600万台,位居世界工业机器人销量排名第三位,仅次于日本、 韩国。据IFR估计,中国未来的工业机器人市场年需求量约为100万台,将成为 世界最大的工业机器人市场。该六自由度串联机器人,可应用在焊接、搬运与装 卸、涂漆、表面处理、切割等多个领域,应用前景巨大。应用领域:焊接、搬运与装卸、涂漆、表面处理、切割等行业技术转化条件(包括:原料、设备、厂房面积的要求及投资规模):按需要可购置国产设备或国外设备、厂房面积1500〜5000m2、具体厂房面积 和投资规模可视企业的情况和产品的批量规模而定。合作方式及条件:合作方式可采取技术转让或协商。 /p
微创全膝关节置换手术机器人
成熟度:-
技术类型:-
应用行业:制造业
技术简介
项目简介: 项目针对术前、术中、术后全周期的 MIS-TKA 机器人综合解决 方案,突破柔顺 7 自由度机械臂与精细操作 2 自由度末端执行器,个 性化虚拟导板以及安全手术操控技术,基于图像配准的增强现实手术 导航技术,术中下肢力线定量检测与修正、以及个性化术后评估技术; 研制出具有术前规划、术中导航与机器人操控、术后评估、以及安全 保障的专科型 MIS-TKA 机器人样机系统,建立 MIS-TKA 机器人手 术流程规范与安全、有效性评估体系。 项目特色: 膝关节损伤是骨科学的主要组成部分,且由于其周围毗邻重要神 经、血管,不恰当的手术操作往往会导致严重后果。微创全膝关节置 换技术手术创伤小,术后恢复快,深受患者好评。但该技术严重限制了手术切口,手术视野小、操作空间窄、骨性标志显露差对医生提出 了更高的要求。本项目从微创全膝关节置换手术外科临床出发,针对 术前、术中、术后三个阶段提出智能化、机器人化手术方案,将微创 精准 TKA 手术提升到智能化水平,推动 TKA 机器人手术技术、TKA 导航技术、TKA 术前规划和术后评估技术、以及智能化手术系统集 成技术的进一步发展,为后续临床验证、产品化奠定坚实的技术基础。 已取得的成果: 已成功研制出脊柱微创手术机器人系统,并开展临床试验(如下图)。
一种三自由度混联码垛机械手
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
介绍 一种三自由度混联码垛机械手,包括机架、转台、大臂、小臂、法兰、第一直线驱动器、第二直线驱动器和第三直线驱动器。所述机架、转台、大臂、第一直线驱动器和第二直线驱动器联接成一个两自由度的并联机构。所述法兰和小臂串联在大臂上,并由联接在大臂上的第三直线驱动器驱动运动。本实用新型结构简单,机构自身运动质量轻、刚性好、惯性小、动力学性能好,与同类产品相比具有负载能力强的特点。 将具有高刚度、高精度、高负载能力的并联机构引入码垛机械手的设计之中,采用2-UPS/U并联机构实现码垛机械手大臂摆转与俯仰运动,在大臂上串联一个小臂,此构型能有效解决现有串联码垛机械手误差累积、刚度差的问题。 正文 技术领域 本实用新型涉及工业机器人领域,特别是一种三自由度混联码垛机械手。 背景技术 码垛机器人广泛应用于机床上下料、冲压机自动化生产线、自动装配流水线、搬运码垛、集装箱等的自动搬运作业当中。现有的码垛机器人主要有直角坐标型、圆柱坐标型以及关节型等结构类型。其中关节型码垛机器人因其机构紧凑、动作灵活、占地面积小、工作空间大等优点,已逐步成为码垛机器人最主要的结构形式。但这类传统开链式串联结构的码垛机器人的驱动电机都需要安装在关节处,导致机器人手臂重量大、刚性差、惯量大、关节误差累积等问题,机构动力学性能较差,难以满足高速重载搬运码垛的要求。并联机构是一种动平台和定平台通过至少两个独立的运动链相连接,有两个或两个以上自由度,且以并联方式驱动的机构。因其具有精度高、结构紧凑、刚度高、承载能力强等优点,引起了国内外众多专家学者的关注,相关研究取得了丰硕的成果,在运动模拟器、并联机床、微操作机器人等方面取得了较好的应用。但并联机构也存在工作空间小的缺点,因此很难满足实际码垛的需求。本实用新型采用混联结构实现机器人码垛运动,能解决传统开链结构误差累计大、刚性差和并联机构工作空间小的问题。 发明内容 本实用新型的目的在于提供一种三自由度混联码垛机械手,可有效提高现有码垛机械手的负载能力。 本实用新型通过以下技术方案达到上述目的:一种三自由度混联码垛机械手包括机架、转台、大臂、小臂、法兰、第一直线驱动器、第二直线驱动器和第三直线驱动器。 所述转台通过第一转动副与机架联接,大臂通过第二转动副与转台联接,小臂通过第三转动副与大臂联接,法兰固结在小臂上,第一直线驱动器一端通过第一虎克铰与机架联接,第一直线驱动器另一端通过第一球铰与大臂联接,第二驱动器一端通过第二虎克铰与机架联接,第二驱动器另一端通过第二球铰与大臂联接,第三直线驱动器一端通过第四转动副与大臂联接,第三直线驱动器另一端通过第五转动副与小臂联接。 本实用新型的突出优点在于: 1、采用混联结构,杆件做成轻杆,机构重量轻、刚性好; 2、机械手惯量小、运动学与动力学性能好; 3、法兰上安装不同的末端执行器,本机构可应用到装配、焊接、激光、医用等领域。
六自由度脊柱手术导引器
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
一种六自由度脊柱手术导引器,包括支撑机构、定位机构以及六自由度并联姿态调整机构,所述六自由度并联姿态调整机构固定于定位机构上,所述六自由度并联姿态调整机构包括上平台、下平台、六个直线副、伸缩杆以及操作套筒,所述六个直线副以两个为一组沿上平台以及下平台均匀设置,每个直线副的上端通过一球形副与上平台连接,每个直线副的下端通过一球形副与下平台连接,所述伸缩杆与所述上平台固定,并向下倾斜延伸后与所述操作套筒连接。上述六自由度脊柱手术导引器,通过支撑机构来支撑姿态调整机构的重量,通过定位机构对人体脊柱的脊凸部分进行定位,由姿态调整机构对不同脊椎段的椎弓根钉道姿态和位置调整和定位,使钉道姿态和位置更精确,更安全可靠。
平面双滑块并联机构二自由度粘片机焊头结构及动作过程
成熟度:正在研发
技术类型:-
应用行业:制造业
技术简介
本发明公开了一种平面双滑块并联机构二自由度粘片机焊头结构及动作过程,该粘片机焊头结构的导轨安装固定在机架上,两个驱动单元分别驱动左右两个滑块沿导轨作往复直线移动,通过三组连杆使两个滑块同焊头座铰接起来,两滑块的移动合成焊头座在工作平面的曲线和直线运动,焊头座上安装有焊头吸嘴,完成焊头吸嘴在拾片点拾取晶片、传送晶片和在多个粘片点粘焊晶片的动作,并且具有多粘片点的粘焊功能,该焊头结构具有相对独立性,在一定的工作范围,通过改改变程序就能适用于不同粘片机的应用场合。
找到162项技术成果数据。
找技术 >平面两自由度双向可逆连杆式集装箱正面吊运起重机
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
摘要:本发明公开了一种平面两自由度双向可逆连杆式集装箱正面吊运起重机,包括车架,吊臂、吊臂转动机构和吊臂伸缩机构,其中,吊臂包括可伸缩连接的转动臂和伸缩臂,转动臂的臂体上安装有相对于其可滑动的滑块,伸缩臂远离转动臂的一端上安装夹紧装置;吊臂转动机构包括位于转动臂两侧且对称的两转动装置,转动装置包括依次铰接的前摇杆、后摇杆和连杆;吊臂伸缩机构包括位于吊臂两侧且对称设置的两伸缩装置,伸缩装置包括伸缩摇杆和伸缩连杆,伸缩摇杆下端与车架的中部铰连,上端与伸缩连杆的下端铰连,伸缩连杆的两端分别与伸缩臂和伸缩摇杆铰连。本起重起机在控制维护和保养成本的同时,消除了起重机的冗余行车路线,其输出轨迹灵活多变。
一种具有五自由度的塑件抓取机械手
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
本发明提供了一种具有五自由度的塑件抓取机械手,所述塑件抓取机械手包括机身、机械臂和机械手,所述机械臂包括主臂和副臂,所述主臂包括由受力板、保持架和连接架,构成具有水平移动自由度的一平面框架,所述副臂包括副臂杆、滑块导轨和副臂气缸,具有竖直方向移动的自由度;所述机身包括底座和机械臂支撑架,所述机械臂支撑架上设有摇杆机构;所述机械手包括抓取机构和腕部回转气缸,所述腕部回转气缸带动所述夹头相对所述机械臂旋转,使所述机械手具有第二旋转自由度。本发明提供的一种具有五自由度的塑件抓取机械手,质量轻,装配精度高,注塑取件过程中能够准确抓取塑件,工作稳定。
一种五自由度外骨骼式上肢康复机器人
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
p 摘要:本发明公开了一种五自由度外骨骼式上肢康复机器人,包括上肩关节旋转组件、上臂旋转组件、肘关节屈伸组件、前臂旋转组件、腕关节屈伸组件、手臂整体旋转组件和手臂整体高度调节箱;上肩关节旋转组件与上臂旋转组件连接;上臂旋转组件与肘关节屈伸组件连接;肘关节屈伸组件与前臂旋转组件连接;前臂旋转组件与腕关节屈伸组件连接;手臂整体旋转组件与上肩关节旋转组件连接;手臂整体旋转组件固定在手臂整体高度调节箱上。该机器人能够实现肩关节的旋转、上臂的内旋外旋、肘关节的屈伸、前臂的内旋外旋和腕关节的屈伸五个自由度的运动以及手臂竖直方向高度调整一个自由度的运动,提高康复运动的科学性、灵活性、有效性。 /p
一种仿人机器人的躯体机构
成熟度:正在研发
技术类型:实用新型
应用行业:交通运输、仓储和邮政业
技术简介
摘要:本实用新型公开了一种仿人机器人的躯体机构,包括一个带1自由度颈部的5自由度头部、两条3自由度手臂、1自由度腰部、两条6自由度腿;5自由度头部用来支持双目立体视觉,每只眼睛均具有2自由度;1自由度颈部能够绕垂直轴转动;每条3自由度手臂的每个肩关节均有2个自由度,每条手臂的肘关节处均有1个自由度;腰部有1个自由度,使得仿人机器人的上身能够绕竖直方向即Z轴在水平面上左右转动躯干;每条6个自由度腿的脚踝处均有2个自由度,每条腿的膝盖均有1个自由度,每个髋部均有3个自由度。本实用新型所述仿人机器人的躯体机构及其自由度不仅能够满足仿人机器人的作业要求,而且能减少仿人机器人的控制复杂度,以及提高仿人机器人的控制精度。
一种用于重型构件运输和安装的六自由度重载车辆
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
摘要:本发明公开一种用于重型构件运输和安装的六自由度重载车辆,包括U型车架和托架平台,托架平台设于U型车架上,U型车架底部设有行走轮机构,托架平台上设有Y轴平移机构和XZ平面旋转机构,托架平移与U型车架之间设有Z轴平移机构,U型车架上设有X轴平移机构、XY平面旋转机构和YZ平面旋转机构。本六自由度重载车辆不仅能在狭窄的空间内进行多方向运输,还能在X轴平移、Y轴平移、Z轴平移、俯仰角度、旋转角度和翻滚角度多维微调的情况下进行精确定位安装,相比于该类传统运输车,能够实现更迅速更准确的多角度运输,避免倒车判定,行车轨迹的考虑,极大提高了桥梁运输效率,缩短运输时间,社会效益明显。
完全重力平衡的6自由度串联式主手机器人
成熟度:正在研发
技术类型:-
应用行业:制造业
技术简介
p 成果与项目的背景及主要用途:近二十年来,机器人技术发展非常迅速,各种用途的机器人在各个领域广泛获 得应用。但我国在机器人的研究和应用方面与工业化国家相比还有一定的差距, 因此研究和设计各种用途的机器人特别是工业机器人、推广机器人的应用是很有 现实意义的。在工业机器人的实际应用中,串联机器人应用最为普遍,已经广泛的 应用于生产中的机械加工、焊接、热处理、表面涂覆、上下料、装配等作业。技术原理与工艺流程简介:一种完全重力平衡的6自由度串联式主手机器人:分别固定在基座上的第一 关节驱动电机和第一关节轴;第一关节丝盘,通过回转副可旋转的连接在第一关 节轴的下端,所述的第一关节驱动电机的输出轴通过传动丝连接第一关节丝盘;两个吊架,分别固定连接在第一关节丝盘底部端面上的两侧;大臂关节轴,该大 臂关节轴的两端部分别对称的固定在所述的两个吊架下端部;第二、三关节丝盘, 该第二、三关节丝盘的回转中心固定连接在大臂关节轴上;平行四边形驱动机构, 该平行四边形驱动机构可旋转的连接在大臂关节轴上,且底部连接腕部机构。本 项目能够实现6自由度力感机器人的完全重力平衡,满足力雅克比方程成立条件, 使主手机器人具有良好的静态透明性,提高力感精度。应用前景分析及效益预测:全球工业机器人需求量保持在一个很高的水平,主要应用在汽车整车、汽车 零部件、电子电气和化工、橡胶和塑料等领域,占比高达60%。根据国际机器人 联合会(IFR)统计,国际机器人市场于2010年开始恢复性增长,其中工业机器 人在2011年的全球市场销量为16.6万台,销售额255亿美元。2011年中国工业 机器人销量达22600万台,位居世界工业机器人销量排名第三位,仅次于日本、 韩国。据IFR估计,中国未来的工业机器人市场年需求量约为100万台,将成为 世界最大的工业机器人市场。该六自由度串联机器人,可应用在焊接、搬运与装 卸、涂漆、表面处理、切割等多个领域,应用前景巨大。应用领域:焊接、搬运与装卸、涂漆、表面处理、切割等行业技术转化条件(包括:原料、设备、厂房面积的要求及投资规模):按需要可购置国产设备或国外设备、厂房面积1500〜5000m2、具体厂房面积 和投资规模可视企业的情况和产品的批量规模而定。合作方式及条件:合作方式可采取技术转让或协商。 /p
微创全膝关节置换手术机器人
成熟度:-
技术类型:-
应用行业:制造业
技术简介
项目简介: 项目针对术前、术中、术后全周期的 MIS-TKA 机器人综合解决 方案,突破柔顺 7 自由度机械臂与精细操作 2 自由度末端执行器,个 性化虚拟导板以及安全手术操控技术,基于图像配准的增强现实手术 导航技术,术中下肢力线定量检测与修正、以及个性化术后评估技术; 研制出具有术前规划、术中导航与机器人操控、术后评估、以及安全 保障的专科型 MIS-TKA 机器人样机系统,建立 MIS-TKA 机器人手 术流程规范与安全、有效性评估体系。 项目特色: 膝关节损伤是骨科学的主要组成部分,且由于其周围毗邻重要神 经、血管,不恰当的手术操作往往会导致严重后果。微创全膝关节置 换技术手术创伤小,术后恢复快,深受患者好评。但该技术严重限制了手术切口,手术视野小、操作空间窄、骨性标志显露差对医生提出 了更高的要求。本项目从微创全膝关节置换手术外科临床出发,针对 术前、术中、术后三个阶段提出智能化、机器人化手术方案,将微创 精准 TKA 手术提升到智能化水平,推动 TKA 机器人手术技术、TKA 导航技术、TKA 术前规划和术后评估技术、以及智能化手术系统集 成技术的进一步发展,为后续临床验证、产品化奠定坚实的技术基础。 已取得的成果: 已成功研制出脊柱微创手术机器人系统,并开展临床试验(如下图)。
一种三自由度混联码垛机械手
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
介绍 一种三自由度混联码垛机械手,包括机架、转台、大臂、小臂、法兰、第一直线驱动器、第二直线驱动器和第三直线驱动器。所述机架、转台、大臂、第一直线驱动器和第二直线驱动器联接成一个两自由度的并联机构。所述法兰和小臂串联在大臂上,并由联接在大臂上的第三直线驱动器驱动运动。本实用新型结构简单,机构自身运动质量轻、刚性好、惯性小、动力学性能好,与同类产品相比具有负载能力强的特点。 将具有高刚度、高精度、高负载能力的并联机构引入码垛机械手的设计之中,采用2-UPS/U并联机构实现码垛机械手大臂摆转与俯仰运动,在大臂上串联一个小臂,此构型能有效解决现有串联码垛机械手误差累积、刚度差的问题。 正文 技术领域 本实用新型涉及工业机器人领域,特别是一种三自由度混联码垛机械手。 背景技术 码垛机器人广泛应用于机床上下料、冲压机自动化生产线、自动装配流水线、搬运码垛、集装箱等的自动搬运作业当中。现有的码垛机器人主要有直角坐标型、圆柱坐标型以及关节型等结构类型。其中关节型码垛机器人因其机构紧凑、动作灵活、占地面积小、工作空间大等优点,已逐步成为码垛机器人最主要的结构形式。但这类传统开链式串联结构的码垛机器人的驱动电机都需要安装在关节处,导致机器人手臂重量大、刚性差、惯量大、关节误差累积等问题,机构动力学性能较差,难以满足高速重载搬运码垛的要求。并联机构是一种动平台和定平台通过至少两个独立的运动链相连接,有两个或两个以上自由度,且以并联方式驱动的机构。因其具有精度高、结构紧凑、刚度高、承载能力强等优点,引起了国内外众多专家学者的关注,相关研究取得了丰硕的成果,在运动模拟器、并联机床、微操作机器人等方面取得了较好的应用。但并联机构也存在工作空间小的缺点,因此很难满足实际码垛的需求。本实用新型采用混联结构实现机器人码垛运动,能解决传统开链结构误差累计大、刚性差和并联机构工作空间小的问题。 发明内容 本实用新型的目的在于提供一种三自由度混联码垛机械手,可有效提高现有码垛机械手的负载能力。 本实用新型通过以下技术方案达到上述目的:一种三自由度混联码垛机械手包括机架、转台、大臂、小臂、法兰、第一直线驱动器、第二直线驱动器和第三直线驱动器。 所述转台通过第一转动副与机架联接,大臂通过第二转动副与转台联接,小臂通过第三转动副与大臂联接,法兰固结在小臂上,第一直线驱动器一端通过第一虎克铰与机架联接,第一直线驱动器另一端通过第一球铰与大臂联接,第二驱动器一端通过第二虎克铰与机架联接,第二驱动器另一端通过第二球铰与大臂联接,第三直线驱动器一端通过第四转动副与大臂联接,第三直线驱动器另一端通过第五转动副与小臂联接。 本实用新型的突出优点在于: 1、采用混联结构,杆件做成轻杆,机构重量轻、刚性好; 2、机械手惯量小、运动学与动力学性能好; 3、法兰上安装不同的末端执行器,本机构可应用到装配、焊接、激光、医用等领域。
六自由度脊柱手术导引器
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
一种六自由度脊柱手术导引器,包括支撑机构、定位机构以及六自由度并联姿态调整机构,所述六自由度并联姿态调整机构固定于定位机构上,所述六自由度并联姿态调整机构包括上平台、下平台、六个直线副、伸缩杆以及操作套筒,所述六个直线副以两个为一组沿上平台以及下平台均匀设置,每个直线副的上端通过一球形副与上平台连接,每个直线副的下端通过一球形副与下平台连接,所述伸缩杆与所述上平台固定,并向下倾斜延伸后与所述操作套筒连接。上述六自由度脊柱手术导引器,通过支撑机构来支撑姿态调整机构的重量,通过定位机构对人体脊柱的脊凸部分进行定位,由姿态调整机构对不同脊椎段的椎弓根钉道姿态和位置调整和定位,使钉道姿态和位置更精确,更安全可靠。
平面双滑块并联机构二自由度粘片机焊头结构及动作过程
成熟度:正在研发
技术类型:-
应用行业:制造业
技术简介
本发明公开了一种平面双滑块并联机构二自由度粘片机焊头结构及动作过程,该粘片机焊头结构的导轨安装固定在机架上,两个驱动单元分别驱动左右两个滑块沿导轨作往复直线移动,通过三组连杆使两个滑块同焊头座铰接起来,两滑块的移动合成焊头座在工作平面的曲线和直线运动,焊头座上安装有焊头吸嘴,完成焊头吸嘴在拾片点拾取晶片、传送晶片和在多个粘片点粘焊晶片的动作,并且具有多粘片点的粘焊功能,该焊头结构具有相对独立性,在一定的工作范围,通过改改变程序就能适用于不同粘片机的应用场合。
找到162项技术成果数据。
找技术 >平面两自由度双向可逆连杆式集装箱正面吊运起重机
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
摘要:本发明公开了一种平面两自由度双向可逆连杆式集装箱正面吊运起重机,包括车架,吊臂、吊臂转动机构和吊臂伸缩机构,其中,吊臂包括可伸缩连接的转动臂和伸缩臂,转动臂的臂体上安装有相对于其可滑动的滑块,伸缩臂远离转动臂的一端上安装夹紧装置;吊臂转动机构包括位于转动臂两侧且对称的两转动装置,转动装置包括依次铰接的前摇杆、后摇杆和连杆;吊臂伸缩机构包括位于吊臂两侧且对称设置的两伸缩装置,伸缩装置包括伸缩摇杆和伸缩连杆,伸缩摇杆下端与车架的中部铰连,上端与伸缩连杆的下端铰连,伸缩连杆的两端分别与伸缩臂和伸缩摇杆铰连。本起重起机在控制维护和保养成本的同时,消除了起重机的冗余行车路线,其输出轨迹灵活多变。
一种具有五自由度的塑件抓取机械手
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
本发明提供了一种具有五自由度的塑件抓取机械手,所述塑件抓取机械手包括机身、机械臂和机械手,所述机械臂包括主臂和副臂,所述主臂包括由受力板、保持架和连接架,构成具有水平移动自由度的一平面框架,所述副臂包括副臂杆、滑块导轨和副臂气缸,具有竖直方向移动的自由度;所述机身包括底座和机械臂支撑架,所述机械臂支撑架上设有摇杆机构;所述机械手包括抓取机构和腕部回转气缸,所述腕部回转气缸带动所述夹头相对所述机械臂旋转,使所述机械手具有第二旋转自由度。本发明提供的一种具有五自由度的塑件抓取机械手,质量轻,装配精度高,注塑取件过程中能够准确抓取塑件,工作稳定。
一种五自由度外骨骼式上肢康复机器人
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
p 摘要:本发明公开了一种五自由度外骨骼式上肢康复机器人,包括上肩关节旋转组件、上臂旋转组件、肘关节屈伸组件、前臂旋转组件、腕关节屈伸组件、手臂整体旋转组件和手臂整体高度调节箱;上肩关节旋转组件与上臂旋转组件连接;上臂旋转组件与肘关节屈伸组件连接;肘关节屈伸组件与前臂旋转组件连接;前臂旋转组件与腕关节屈伸组件连接;手臂整体旋转组件与上肩关节旋转组件连接;手臂整体旋转组件固定在手臂整体高度调节箱上。该机器人能够实现肩关节的旋转、上臂的内旋外旋、肘关节的屈伸、前臂的内旋外旋和腕关节的屈伸五个自由度的运动以及手臂竖直方向高度调整一个自由度的运动,提高康复运动的科学性、灵活性、有效性。 /p
一种仿人机器人的躯体机构
成熟度:正在研发
技术类型:实用新型
应用行业:交通运输、仓储和邮政业
技术简介
摘要:本实用新型公开了一种仿人机器人的躯体机构,包括一个带1自由度颈部的5自由度头部、两条3自由度手臂、1自由度腰部、两条6自由度腿;5自由度头部用来支持双目立体视觉,每只眼睛均具有2自由度;1自由度颈部能够绕垂直轴转动;每条3自由度手臂的每个肩关节均有2个自由度,每条手臂的肘关节处均有1个自由度;腰部有1个自由度,使得仿人机器人的上身能够绕竖直方向即Z轴在水平面上左右转动躯干;每条6个自由度腿的脚踝处均有2个自由度,每条腿的膝盖均有1个自由度,每个髋部均有3个自由度。本实用新型所述仿人机器人的躯体机构及其自由度不仅能够满足仿人机器人的作业要求,而且能减少仿人机器人的控制复杂度,以及提高仿人机器人的控制精度。
一种用于重型构件运输和安装的六自由度重载车辆
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
摘要:本发明公开一种用于重型构件运输和安装的六自由度重载车辆,包括U型车架和托架平台,托架平台设于U型车架上,U型车架底部设有行走轮机构,托架平台上设有Y轴平移机构和XZ平面旋转机构,托架平移与U型车架之间设有Z轴平移机构,U型车架上设有X轴平移机构、XY平面旋转机构和YZ平面旋转机构。本六自由度重载车辆不仅能在狭窄的空间内进行多方向运输,还能在X轴平移、Y轴平移、Z轴平移、俯仰角度、旋转角度和翻滚角度多维微调的情况下进行精确定位安装,相比于该类传统运输车,能够实现更迅速更准确的多角度运输,避免倒车判定,行车轨迹的考虑,极大提高了桥梁运输效率,缩短运输时间,社会效益明显。
完全重力平衡的6自由度串联式主手机器人
成熟度:正在研发
技术类型:-
应用行业:制造业
技术简介
p 成果与项目的背景及主要用途:近二十年来,机器人技术发展非常迅速,各种用途的机器人在各个领域广泛获 得应用。但我国在机器人的研究和应用方面与工业化国家相比还有一定的差距, 因此研究和设计各种用途的机器人特别是工业机器人、推广机器人的应用是很有 现实意义的。在工业机器人的实际应用中,串联机器人应用最为普遍,已经广泛的 应用于生产中的机械加工、焊接、热处理、表面涂覆、上下料、装配等作业。技术原理与工艺流程简介:一种完全重力平衡的6自由度串联式主手机器人:分别固定在基座上的第一 关节驱动电机和第一关节轴;第一关节丝盘,通过回转副可旋转的连接在第一关 节轴的下端,所述的第一关节驱动电机的输出轴通过传动丝连接第一关节丝盘;两个吊架,分别固定连接在第一关节丝盘底部端面上的两侧;大臂关节轴,该大 臂关节轴的两端部分别对称的固定在所述的两个吊架下端部;第二、三关节丝盘, 该第二、三关节丝盘的回转中心固定连接在大臂关节轴上;平行四边形驱动机构, 该平行四边形驱动机构可旋转的连接在大臂关节轴上,且底部连接腕部机构。本 项目能够实现6自由度力感机器人的完全重力平衡,满足力雅克比方程成立条件, 使主手机器人具有良好的静态透明性,提高力感精度。应用前景分析及效益预测:全球工业机器人需求量保持在一个很高的水平,主要应用在汽车整车、汽车 零部件、电子电气和化工、橡胶和塑料等领域,占比高达60%。根据国际机器人 联合会(IFR)统计,国际机器人市场于2010年开始恢复性增长,其中工业机器 人在2011年的全球市场销量为16.6万台,销售额255亿美元。2011年中国工业 机器人销量达22600万台,位居世界工业机器人销量排名第三位,仅次于日本、 韩国。据IFR估计,中国未来的工业机器人市场年需求量约为100万台,将成为 世界最大的工业机器人市场。该六自由度串联机器人,可应用在焊接、搬运与装 卸、涂漆、表面处理、切割等多个领域,应用前景巨大。应用领域:焊接、搬运与装卸、涂漆、表面处理、切割等行业技术转化条件(包括:原料、设备、厂房面积的要求及投资规模):按需要可购置国产设备或国外设备、厂房面积1500〜5000m2、具体厂房面积 和投资规模可视企业的情况和产品的批量规模而定。合作方式及条件:合作方式可采取技术转让或协商。 /p
微创全膝关节置换手术机器人
成熟度:-
技术类型:-
应用行业:制造业
技术简介
项目简介: 项目针对术前、术中、术后全周期的 MIS-TKA 机器人综合解决 方案,突破柔顺 7 自由度机械臂与精细操作 2 自由度末端执行器,个 性化虚拟导板以及安全手术操控技术,基于图像配准的增强现实手术 导航技术,术中下肢力线定量检测与修正、以及个性化术后评估技术; 研制出具有术前规划、术中导航与机器人操控、术后评估、以及安全 保障的专科型 MIS-TKA 机器人样机系统,建立 MIS-TKA 机器人手 术流程规范与安全、有效性评估体系。 项目特色: 膝关节损伤是骨科学的主要组成部分,且由于其周围毗邻重要神 经、血管,不恰当的手术操作往往会导致严重后果。微创全膝关节置 换技术手术创伤小,术后恢复快,深受患者好评。但该技术严重限制了手术切口,手术视野小、操作空间窄、骨性标志显露差对医生提出 了更高的要求。本项目从微创全膝关节置换手术外科临床出发,针对 术前、术中、术后三个阶段提出智能化、机器人化手术方案,将微创 精准 TKA 手术提升到智能化水平,推动 TKA 机器人手术技术、TKA 导航技术、TKA 术前规划和术后评估技术、以及智能化手术系统集 成技术的进一步发展,为后续临床验证、产品化奠定坚实的技术基础。 已取得的成果: 已成功研制出脊柱微创手术机器人系统,并开展临床试验(如下图)。
一种三自由度混联码垛机械手
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
介绍 一种三自由度混联码垛机械手,包括机架、转台、大臂、小臂、法兰、第一直线驱动器、第二直线驱动器和第三直线驱动器。所述机架、转台、大臂、第一直线驱动器和第二直线驱动器联接成一个两自由度的并联机构。所述法兰和小臂串联在大臂上,并由联接在大臂上的第三直线驱动器驱动运动。本实用新型结构简单,机构自身运动质量轻、刚性好、惯性小、动力学性能好,与同类产品相比具有负载能力强的特点。 将具有高刚度、高精度、高负载能力的并联机构引入码垛机械手的设计之中,采用2-UPS/U并联机构实现码垛机械手大臂摆转与俯仰运动,在大臂上串联一个小臂,此构型能有效解决现有串联码垛机械手误差累积、刚度差的问题。 正文 技术领域 本实用新型涉及工业机器人领域,特别是一种三自由度混联码垛机械手。 背景技术 码垛机器人广泛应用于机床上下料、冲压机自动化生产线、自动装配流水线、搬运码垛、集装箱等的自动搬运作业当中。现有的码垛机器人主要有直角坐标型、圆柱坐标型以及关节型等结构类型。其中关节型码垛机器人因其机构紧凑、动作灵活、占地面积小、工作空间大等优点,已逐步成为码垛机器人最主要的结构形式。但这类传统开链式串联结构的码垛机器人的驱动电机都需要安装在关节处,导致机器人手臂重量大、刚性差、惯量大、关节误差累积等问题,机构动力学性能较差,难以满足高速重载搬运码垛的要求。并联机构是一种动平台和定平台通过至少两个独立的运动链相连接,有两个或两个以上自由度,且以并联方式驱动的机构。因其具有精度高、结构紧凑、刚度高、承载能力强等优点,引起了国内外众多专家学者的关注,相关研究取得了丰硕的成果,在运动模拟器、并联机床、微操作机器人等方面取得了较好的应用。但并联机构也存在工作空间小的缺点,因此很难满足实际码垛的需求。本实用新型采用混联结构实现机器人码垛运动,能解决传统开链结构误差累计大、刚性差和并联机构工作空间小的问题。 发明内容 本实用新型的目的在于提供一种三自由度混联码垛机械手,可有效提高现有码垛机械手的负载能力。 本实用新型通过以下技术方案达到上述目的:一种三自由度混联码垛机械手包括机架、转台、大臂、小臂、法兰、第一直线驱动器、第二直线驱动器和第三直线驱动器。 所述转台通过第一转动副与机架联接,大臂通过第二转动副与转台联接,小臂通过第三转动副与大臂联接,法兰固结在小臂上,第一直线驱动器一端通过第一虎克铰与机架联接,第一直线驱动器另一端通过第一球铰与大臂联接,第二驱动器一端通过第二虎克铰与机架联接,第二驱动器另一端通过第二球铰与大臂联接,第三直线驱动器一端通过第四转动副与大臂联接,第三直线驱动器另一端通过第五转动副与小臂联接。 本实用新型的突出优点在于: 1、采用混联结构,杆件做成轻杆,机构重量轻、刚性好; 2、机械手惯量小、运动学与动力学性能好; 3、法兰上安装不同的末端执行器,本机构可应用到装配、焊接、激光、医用等领域。
六自由度脊柱手术导引器
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
一种六自由度脊柱手术导引器,包括支撑机构、定位机构以及六自由度并联姿态调整机构,所述六自由度并联姿态调整机构固定于定位机构上,所述六自由度并联姿态调整机构包括上平台、下平台、六个直线副、伸缩杆以及操作套筒,所述六个直线副以两个为一组沿上平台以及下平台均匀设置,每个直线副的上端通过一球形副与上平台连接,每个直线副的下端通过一球形副与下平台连接,所述伸缩杆与所述上平台固定,并向下倾斜延伸后与所述操作套筒连接。上述六自由度脊柱手术导引器,通过支撑机构来支撑姿态调整机构的重量,通过定位机构对人体脊柱的脊凸部分进行定位,由姿态调整机构对不同脊椎段的椎弓根钉道姿态和位置调整和定位,使钉道姿态和位置更精确,更安全可靠。
平面双滑块并联机构二自由度粘片机焊头结构及动作过程
成熟度:正在研发
技术类型:-
应用行业:制造业
技术简介
本发明公开了一种平面双滑块并联机构二自由度粘片机焊头结构及动作过程,该粘片机焊头结构的导轨安装固定在机架上,两个驱动单元分别驱动左右两个滑块沿导轨作往复直线移动,通过三组连杆使两个滑块同焊头座铰接起来,两滑块的移动合成焊头座在工作平面的曲线和直线运动,焊头座上安装有焊头吸嘴,完成焊头吸嘴在拾片点拾取晶片、传送晶片和在多个粘片点粘焊晶片的动作,并且具有多粘片点的粘焊功能,该焊头结构具有相对独立性,在一定的工作范围,通过改改变程序就能适用于不同粘片机的应用场合。
找到162项技术成果数据。
找技术 >平面两自由度双向可逆连杆式集装箱正面吊运起重机
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
摘要:本发明公开了一种平面两自由度双向可逆连杆式集装箱正面吊运起重机,包括车架,吊臂、吊臂转动机构和吊臂伸缩机构,其中,吊臂包括可伸缩连接的转动臂和伸缩臂,转动臂的臂体上安装有相对于其可滑动的滑块,伸缩臂远离转动臂的一端上安装夹紧装置;吊臂转动机构包括位于转动臂两侧且对称的两转动装置,转动装置包括依次铰接的前摇杆、后摇杆和连杆;吊臂伸缩机构包括位于吊臂两侧且对称设置的两伸缩装置,伸缩装置包括伸缩摇杆和伸缩连杆,伸缩摇杆下端与车架的中部铰连,上端与伸缩连杆的下端铰连,伸缩连杆的两端分别与伸缩臂和伸缩摇杆铰连。本起重起机在控制维护和保养成本的同时,消除了起重机的冗余行车路线,其输出轨迹灵活多变。
一种具有五自由度的塑件抓取机械手
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
本发明提供了一种具有五自由度的塑件抓取机械手,所述塑件抓取机械手包括机身、机械臂和机械手,所述机械臂包括主臂和副臂,所述主臂包括由受力板、保持架和连接架,构成具有水平移动自由度的一平面框架,所述副臂包括副臂杆、滑块导轨和副臂气缸,具有竖直方向移动的自由度;所述机身包括底座和机械臂支撑架,所述机械臂支撑架上设有摇杆机构;所述机械手包括抓取机构和腕部回转气缸,所述腕部回转气缸带动所述夹头相对所述机械臂旋转,使所述机械手具有第二旋转自由度。本发明提供的一种具有五自由度的塑件抓取机械手,质量轻,装配精度高,注塑取件过程中能够准确抓取塑件,工作稳定。
一种五自由度外骨骼式上肢康复机器人
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
p 摘要:本发明公开了一种五自由度外骨骼式上肢康复机器人,包括上肩关节旋转组件、上臂旋转组件、肘关节屈伸组件、前臂旋转组件、腕关节屈伸组件、手臂整体旋转组件和手臂整体高度调节箱;上肩关节旋转组件与上臂旋转组件连接;上臂旋转组件与肘关节屈伸组件连接;肘关节屈伸组件与前臂旋转组件连接;前臂旋转组件与腕关节屈伸组件连接;手臂整体旋转组件与上肩关节旋转组件连接;手臂整体旋转组件固定在手臂整体高度调节箱上。该机器人能够实现肩关节的旋转、上臂的内旋外旋、肘关节的屈伸、前臂的内旋外旋和腕关节的屈伸五个自由度的运动以及手臂竖直方向高度调整一个自由度的运动,提高康复运动的科学性、灵活性、有效性。 /p
一种仿人机器人的躯体机构
成熟度:正在研发
技术类型:实用新型
应用行业:交通运输、仓储和邮政业
技术简介
摘要:本实用新型公开了一种仿人机器人的躯体机构,包括一个带1自由度颈部的5自由度头部、两条3自由度手臂、1自由度腰部、两条6自由度腿;5自由度头部用来支持双目立体视觉,每只眼睛均具有2自由度;1自由度颈部能够绕垂直轴转动;每条3自由度手臂的每个肩关节均有2个自由度,每条手臂的肘关节处均有1个自由度;腰部有1个自由度,使得仿人机器人的上身能够绕竖直方向即Z轴在水平面上左右转动躯干;每条6个自由度腿的脚踝处均有2个自由度,每条腿的膝盖均有1个自由度,每个髋部均有3个自由度。本实用新型所述仿人机器人的躯体机构及其自由度不仅能够满足仿人机器人的作业要求,而且能减少仿人机器人的控制复杂度,以及提高仿人机器人的控制精度。
一种用于重型构件运输和安装的六自由度重载车辆
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
摘要:本发明公开一种用于重型构件运输和安装的六自由度重载车辆,包括U型车架和托架平台,托架平台设于U型车架上,U型车架底部设有行走轮机构,托架平台上设有Y轴平移机构和XZ平面旋转机构,托架平移与U型车架之间设有Z轴平移机构,U型车架上设有X轴平移机构、XY平面旋转机构和YZ平面旋转机构。本六自由度重载车辆不仅能在狭窄的空间内进行多方向运输,还能在X轴平移、Y轴平移、Z轴平移、俯仰角度、旋转角度和翻滚角度多维微调的情况下进行精确定位安装,相比于该类传统运输车,能够实现更迅速更准确的多角度运输,避免倒车判定,行车轨迹的考虑,极大提高了桥梁运输效率,缩短运输时间,社会效益明显。
完全重力平衡的6自由度串联式主手机器人
成熟度:正在研发
技术类型:-
应用行业:制造业
技术简介
p 成果与项目的背景及主要用途:近二十年来,机器人技术发展非常迅速,各种用途的机器人在各个领域广泛获 得应用。但我国在机器人的研究和应用方面与工业化国家相比还有一定的差距, 因此研究和设计各种用途的机器人特别是工业机器人、推广机器人的应用是很有 现实意义的。在工业机器人的实际应用中,串联机器人应用最为普遍,已经广泛的 应用于生产中的机械加工、焊接、热处理、表面涂覆、上下料、装配等作业。技术原理与工艺流程简介:一种完全重力平衡的6自由度串联式主手机器人:分别固定在基座上的第一 关节驱动电机和第一关节轴;第一关节丝盘,通过回转副可旋转的连接在第一关 节轴的下端,所述的第一关节驱动电机的输出轴通过传动丝连接第一关节丝盘;两个吊架,分别固定连接在第一关节丝盘底部端面上的两侧;大臂关节轴,该大 臂关节轴的两端部分别对称的固定在所述的两个吊架下端部;第二、三关节丝盘, 该第二、三关节丝盘的回转中心固定连接在大臂关节轴上;平行四边形驱动机构, 该平行四边形驱动机构可旋转的连接在大臂关节轴上,且底部连接腕部机构。本 项目能够实现6自由度力感机器人的完全重力平衡,满足力雅克比方程成立条件, 使主手机器人具有良好的静态透明性,提高力感精度。应用前景分析及效益预测:全球工业机器人需求量保持在一个很高的水平,主要应用在汽车整车、汽车 零部件、电子电气和化工、橡胶和塑料等领域,占比高达60%。根据国际机器人 联合会(IFR)统计,国际机器人市场于2010年开始恢复性增长,其中工业机器 人在2011年的全球市场销量为16.6万台,销售额255亿美元。2011年中国工业 机器人销量达22600万台,位居世界工业机器人销量排名第三位,仅次于日本、 韩国。据IFR估计,中国未来的工业机器人市场年需求量约为100万台,将成为 世界最大的工业机器人市场。该六自由度串联机器人,可应用在焊接、搬运与装 卸、涂漆、表面处理、切割等多个领域,应用前景巨大。应用领域:焊接、搬运与装卸、涂漆、表面处理、切割等行业技术转化条件(包括:原料、设备、厂房面积的要求及投资规模):按需要可购置国产设备或国外设备、厂房面积1500〜5000m2、具体厂房面积 和投资规模可视企业的情况和产品的批量规模而定。合作方式及条件:合作方式可采取技术转让或协商。 /p
微创全膝关节置换手术机器人
成熟度:-
技术类型:-
应用行业:制造业
技术简介
项目简介: 项目针对术前、术中、术后全周期的 MIS-TKA 机器人综合解决 方案,突破柔顺 7 自由度机械臂与精细操作 2 自由度末端执行器,个 性化虚拟导板以及安全手术操控技术,基于图像配准的增强现实手术 导航技术,术中下肢力线定量检测与修正、以及个性化术后评估技术; 研制出具有术前规划、术中导航与机器人操控、术后评估、以及安全 保障的专科型 MIS-TKA 机器人样机系统,建立 MIS-TKA 机器人手 术流程规范与安全、有效性评估体系。 项目特色: 膝关节损伤是骨科学的主要组成部分,且由于其周围毗邻重要神 经、血管,不恰当的手术操作往往会导致严重后果。微创全膝关节置 换技术手术创伤小,术后恢复快,深受患者好评。但该技术严重限制了手术切口,手术视野小、操作空间窄、骨性标志显露差对医生提出 了更高的要求。本项目从微创全膝关节置换手术外科临床出发,针对 术前、术中、术后三个阶段提出智能化、机器人化手术方案,将微创 精准 TKA 手术提升到智能化水平,推动 TKA 机器人手术技术、TKA 导航技术、TKA 术前规划和术后评估技术、以及智能化手术系统集 成技术的进一步发展,为后续临床验证、产品化奠定坚实的技术基础。 已取得的成果: 已成功研制出脊柱微创手术机器人系统,并开展临床试验(如下图)。
一种三自由度混联码垛机械手
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
介绍 一种三自由度混联码垛机械手,包括机架、转台、大臂、小臂、法兰、第一直线驱动器、第二直线驱动器和第三直线驱动器。所述机架、转台、大臂、第一直线驱动器和第二直线驱动器联接成一个两自由度的并联机构。所述法兰和小臂串联在大臂上,并由联接在大臂上的第三直线驱动器驱动运动。本实用新型结构简单,机构自身运动质量轻、刚性好、惯性小、动力学性能好,与同类产品相比具有负载能力强的特点。 将具有高刚度、高精度、高负载能力的并联机构引入码垛机械手的设计之中,采用2-UPS/U并联机构实现码垛机械手大臂摆转与俯仰运动,在大臂上串联一个小臂,此构型能有效解决现有串联码垛机械手误差累积、刚度差的问题。 正文 技术领域 本实用新型涉及工业机器人领域,特别是一种三自由度混联码垛机械手。 背景技术 码垛机器人广泛应用于机床上下料、冲压机自动化生产线、自动装配流水线、搬运码垛、集装箱等的自动搬运作业当中。现有的码垛机器人主要有直角坐标型、圆柱坐标型以及关节型等结构类型。其中关节型码垛机器人因其机构紧凑、动作灵活、占地面积小、工作空间大等优点,已逐步成为码垛机器人最主要的结构形式。但这类传统开链式串联结构的码垛机器人的驱动电机都需要安装在关节处,导致机器人手臂重量大、刚性差、惯量大、关节误差累积等问题,机构动力学性能较差,难以满足高速重载搬运码垛的要求。并联机构是一种动平台和定平台通过至少两个独立的运动链相连接,有两个或两个以上自由度,且以并联方式驱动的机构。因其具有精度高、结构紧凑、刚度高、承载能力强等优点,引起了国内外众多专家学者的关注,相关研究取得了丰硕的成果,在运动模拟器、并联机床、微操作机器人等方面取得了较好的应用。但并联机构也存在工作空间小的缺点,因此很难满足实际码垛的需求。本实用新型采用混联结构实现机器人码垛运动,能解决传统开链结构误差累计大、刚性差和并联机构工作空间小的问题。 发明内容 本实用新型的目的在于提供一种三自由度混联码垛机械手,可有效提高现有码垛机械手的负载能力。 本实用新型通过以下技术方案达到上述目的:一种三自由度混联码垛机械手包括机架、转台、大臂、小臂、法兰、第一直线驱动器、第二直线驱动器和第三直线驱动器。 所述转台通过第一转动副与机架联接,大臂通过第二转动副与转台联接,小臂通过第三转动副与大臂联接,法兰固结在小臂上,第一直线驱动器一端通过第一虎克铰与机架联接,第一直线驱动器另一端通过第一球铰与大臂联接,第二驱动器一端通过第二虎克铰与机架联接,第二驱动器另一端通过第二球铰与大臂联接,第三直线驱动器一端通过第四转动副与大臂联接,第三直线驱动器另一端通过第五转动副与小臂联接。 本实用新型的突出优点在于: 1、采用混联结构,杆件做成轻杆,机构重量轻、刚性好; 2、机械手惯量小、运动学与动力学性能好; 3、法兰上安装不同的末端执行器,本机构可应用到装配、焊接、激光、医用等领域。
六自由度脊柱手术导引器
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
一种六自由度脊柱手术导引器,包括支撑机构、定位机构以及六自由度并联姿态调整机构,所述六自由度并联姿态调整机构固定于定位机构上,所述六自由度并联姿态调整机构包括上平台、下平台、六个直线副、伸缩杆以及操作套筒,所述六个直线副以两个为一组沿上平台以及下平台均匀设置,每个直线副的上端通过一球形副与上平台连接,每个直线副的下端通过一球形副与下平台连接,所述伸缩杆与所述上平台固定,并向下倾斜延伸后与所述操作套筒连接。上述六自由度脊柱手术导引器,通过支撑机构来支撑姿态调整机构的重量,通过定位机构对人体脊柱的脊凸部分进行定位,由姿态调整机构对不同脊椎段的椎弓根钉道姿态和位置调整和定位,使钉道姿态和位置更精确,更安全可靠。
平面双滑块并联机构二自由度粘片机焊头结构及动作过程
成熟度:正在研发
技术类型:-
应用行业:制造业
技术简介
本发明公开了一种平面双滑块并联机构二自由度粘片机焊头结构及动作过程,该粘片机焊头结构的导轨安装固定在机架上,两个驱动单元分别驱动左右两个滑块沿导轨作往复直线移动,通过三组连杆使两个滑块同焊头座铰接起来,两滑块的移动合成焊头座在工作平面的曲线和直线运动,焊头座上安装有焊头吸嘴,完成焊头吸嘴在拾片点拾取晶片、传送晶片和在多个粘片点粘焊晶片的动作,并且具有多粘片点的粘焊功能,该焊头结构具有相对独立性,在一定的工作范围,通过改改变程序就能适用于不同粘片机的应用场合。
找到162项技术成果数据。
找技术 >平面两自由度双向可逆连杆式集装箱正面吊运起重机
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
摘要:本发明公开了一种平面两自由度双向可逆连杆式集装箱正面吊运起重机,包括车架,吊臂、吊臂转动机构和吊臂伸缩机构,其中,吊臂包括可伸缩连接的转动臂和伸缩臂,转动臂的臂体上安装有相对于其可滑动的滑块,伸缩臂远离转动臂的一端上安装夹紧装置;吊臂转动机构包括位于转动臂两侧且对称的两转动装置,转动装置包括依次铰接的前摇杆、后摇杆和连杆;吊臂伸缩机构包括位于吊臂两侧且对称设置的两伸缩装置,伸缩装置包括伸缩摇杆和伸缩连杆,伸缩摇杆下端与车架的中部铰连,上端与伸缩连杆的下端铰连,伸缩连杆的两端分别与伸缩臂和伸缩摇杆铰连。本起重起机在控制维护和保养成本的同时,消除了起重机的冗余行车路线,其输出轨迹灵活多变。
一种具有五自由度的塑件抓取机械手
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
本发明提供了一种具有五自由度的塑件抓取机械手,所述塑件抓取机械手包括机身、机械臂和机械手,所述机械臂包括主臂和副臂,所述主臂包括由受力板、保持架和连接架,构成具有水平移动自由度的一平面框架,所述副臂包括副臂杆、滑块导轨和副臂气缸,具有竖直方向移动的自由度;所述机身包括底座和机械臂支撑架,所述机械臂支撑架上设有摇杆机构;所述机械手包括抓取机构和腕部回转气缸,所述腕部回转气缸带动所述夹头相对所述机械臂旋转,使所述机械手具有第二旋转自由度。本发明提供的一种具有五自由度的塑件抓取机械手,质量轻,装配精度高,注塑取件过程中能够准确抓取塑件,工作稳定。
一种五自由度外骨骼式上肢康复机器人
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
p 摘要:本发明公开了一种五自由度外骨骼式上肢康复机器人,包括上肩关节旋转组件、上臂旋转组件、肘关节屈伸组件、前臂旋转组件、腕关节屈伸组件、手臂整体旋转组件和手臂整体高度调节箱;上肩关节旋转组件与上臂旋转组件连接;上臂旋转组件与肘关节屈伸组件连接;肘关节屈伸组件与前臂旋转组件连接;前臂旋转组件与腕关节屈伸组件连接;手臂整体旋转组件与上肩关节旋转组件连接;手臂整体旋转组件固定在手臂整体高度调节箱上。该机器人能够实现肩关节的旋转、上臂的内旋外旋、肘关节的屈伸、前臂的内旋外旋和腕关节的屈伸五个自由度的运动以及手臂竖直方向高度调整一个自由度的运动,提高康复运动的科学性、灵活性、有效性。 /p
一种仿人机器人的躯体机构
成熟度:正在研发
技术类型:实用新型
应用行业:交通运输、仓储和邮政业
技术简介
摘要:本实用新型公开了一种仿人机器人的躯体机构,包括一个带1自由度颈部的5自由度头部、两条3自由度手臂、1自由度腰部、两条6自由度腿;5自由度头部用来支持双目立体视觉,每只眼睛均具有2自由度;1自由度颈部能够绕垂直轴转动;每条3自由度手臂的每个肩关节均有2个自由度,每条手臂的肘关节处均有1个自由度;腰部有1个自由度,使得仿人机器人的上身能够绕竖直方向即Z轴在水平面上左右转动躯干;每条6个自由度腿的脚踝处均有2个自由度,每条腿的膝盖均有1个自由度,每个髋部均有3个自由度。本实用新型所述仿人机器人的躯体机构及其自由度不仅能够满足仿人机器人的作业要求,而且能减少仿人机器人的控制复杂度,以及提高仿人机器人的控制精度。
一种用于重型构件运输和安装的六自由度重载车辆
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
摘要:本发明公开一种用于重型构件运输和安装的六自由度重载车辆,包括U型车架和托架平台,托架平台设于U型车架上,U型车架底部设有行走轮机构,托架平台上设有Y轴平移机构和XZ平面旋转机构,托架平移与U型车架之间设有Z轴平移机构,U型车架上设有X轴平移机构、XY平面旋转机构和YZ平面旋转机构。本六自由度重载车辆不仅能在狭窄的空间内进行多方向运输,还能在X轴平移、Y轴平移、Z轴平移、俯仰角度、旋转角度和翻滚角度多维微调的情况下进行精确定位安装,相比于该类传统运输车,能够实现更迅速更准确的多角度运输,避免倒车判定,行车轨迹的考虑,极大提高了桥梁运输效率,缩短运输时间,社会效益明显。
完全重力平衡的6自由度串联式主手机器人
成熟度:正在研发
技术类型:-
应用行业:制造业
技术简介
p 成果与项目的背景及主要用途:近二十年来,机器人技术发展非常迅速,各种用途的机器人在各个领域广泛获 得应用。但我国在机器人的研究和应用方面与工业化国家相比还有一定的差距, 因此研究和设计各种用途的机器人特别是工业机器人、推广机器人的应用是很有 现实意义的。在工业机器人的实际应用中,串联机器人应用最为普遍,已经广泛的 应用于生产中的机械加工、焊接、热处理、表面涂覆、上下料、装配等作业。技术原理与工艺流程简介:一种完全重力平衡的6自由度串联式主手机器人:分别固定在基座上的第一 关节驱动电机和第一关节轴;第一关节丝盘,通过回转副可旋转的连接在第一关 节轴的下端,所述的第一关节驱动电机的输出轴通过传动丝连接第一关节丝盘;两个吊架,分别固定连接在第一关节丝盘底部端面上的两侧;大臂关节轴,该大 臂关节轴的两端部分别对称的固定在所述的两个吊架下端部;第二、三关节丝盘, 该第二、三关节丝盘的回转中心固定连接在大臂关节轴上;平行四边形驱动机构, 该平行四边形驱动机构可旋转的连接在大臂关节轴上,且底部连接腕部机构。本 项目能够实现6自由度力感机器人的完全重力平衡,满足力雅克比方程成立条件, 使主手机器人具有良好的静态透明性,提高力感精度。应用前景分析及效益预测:全球工业机器人需求量保持在一个很高的水平,主要应用在汽车整车、汽车 零部件、电子电气和化工、橡胶和塑料等领域,占比高达60%。根据国际机器人 联合会(IFR)统计,国际机器人市场于2010年开始恢复性增长,其中工业机器 人在2011年的全球市场销量为16.6万台,销售额255亿美元。2011年中国工业 机器人销量达22600万台,位居世界工业机器人销量排名第三位,仅次于日本、 韩国。据IFR估计,中国未来的工业机器人市场年需求量约为100万台,将成为 世界最大的工业机器人市场。该六自由度串联机器人,可应用在焊接、搬运与装 卸、涂漆、表面处理、切割等多个领域,应用前景巨大。应用领域:焊接、搬运与装卸、涂漆、表面处理、切割等行业技术转化条件(包括:原料、设备、厂房面积的要求及投资规模):按需要可购置国产设备或国外设备、厂房面积1500〜5000m2、具体厂房面积 和投资规模可视企业的情况和产品的批量规模而定。合作方式及条件:合作方式可采取技术转让或协商。 /p
微创全膝关节置换手术机器人
成熟度:-
技术类型:-
应用行业:制造业
技术简介
项目简介: 项目针对术前、术中、术后全周期的 MIS-TKA 机器人综合解决 方案,突破柔顺 7 自由度机械臂与精细操作 2 自由度末端执行器,个 性化虚拟导板以及安全手术操控技术,基于图像配准的增强现实手术 导航技术,术中下肢力线定量检测与修正、以及个性化术后评估技术; 研制出具有术前规划、术中导航与机器人操控、术后评估、以及安全 保障的专科型 MIS-TKA 机器人样机系统,建立 MIS-TKA 机器人手 术流程规范与安全、有效性评估体系。 项目特色: 膝关节损伤是骨科学的主要组成部分,且由于其周围毗邻重要神 经、血管,不恰当的手术操作往往会导致严重后果。微创全膝关节置 换技术手术创伤小,术后恢复快,深受患者好评。但该技术严重限制了手术切口,手术视野小、操作空间窄、骨性标志显露差对医生提出 了更高的要求。本项目从微创全膝关节置换手术外科临床出发,针对 术前、术中、术后三个阶段提出智能化、机器人化手术方案,将微创 精准 TKA 手术提升到智能化水平,推动 TKA 机器人手术技术、TKA 导航技术、TKA 术前规划和术后评估技术、以及智能化手术系统集 成技术的进一步发展,为后续临床验证、产品化奠定坚实的技术基础。 已取得的成果: 已成功研制出脊柱微创手术机器人系统,并开展临床试验(如下图)。
一种三自由度混联码垛机械手
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
介绍 一种三自由度混联码垛机械手,包括机架、转台、大臂、小臂、法兰、第一直线驱动器、第二直线驱动器和第三直线驱动器。所述机架、转台、大臂、第一直线驱动器和第二直线驱动器联接成一个两自由度的并联机构。所述法兰和小臂串联在大臂上,并由联接在大臂上的第三直线驱动器驱动运动。本实用新型结构简单,机构自身运动质量轻、刚性好、惯性小、动力学性能好,与同类产品相比具有负载能力强的特点。 将具有高刚度、高精度、高负载能力的并联机构引入码垛机械手的设计之中,采用2-UPS/U并联机构实现码垛机械手大臂摆转与俯仰运动,在大臂上串联一个小臂,此构型能有效解决现有串联码垛机械手误差累积、刚度差的问题。 正文 技术领域 本实用新型涉及工业机器人领域,特别是一种三自由度混联码垛机械手。 背景技术 码垛机器人广泛应用于机床上下料、冲压机自动化生产线、自动装配流水线、搬运码垛、集装箱等的自动搬运作业当中。现有的码垛机器人主要有直角坐标型、圆柱坐标型以及关节型等结构类型。其中关节型码垛机器人因其机构紧凑、动作灵活、占地面积小、工作空间大等优点,已逐步成为码垛机器人最主要的结构形式。但这类传统开链式串联结构的码垛机器人的驱动电机都需要安装在关节处,导致机器人手臂重量大、刚性差、惯量大、关节误差累积等问题,机构动力学性能较差,难以满足高速重载搬运码垛的要求。并联机构是一种动平台和定平台通过至少两个独立的运动链相连接,有两个或两个以上自由度,且以并联方式驱动的机构。因其具有精度高、结构紧凑、刚度高、承载能力强等优点,引起了国内外众多专家学者的关注,相关研究取得了丰硕的成果,在运动模拟器、并联机床、微操作机器人等方面取得了较好的应用。但并联机构也存在工作空间小的缺点,因此很难满足实际码垛的需求。本实用新型采用混联结构实现机器人码垛运动,能解决传统开链结构误差累计大、刚性差和并联机构工作空间小的问题。 发明内容 本实用新型的目的在于提供一种三自由度混联码垛机械手,可有效提高现有码垛机械手的负载能力。 本实用新型通过以下技术方案达到上述目的:一种三自由度混联码垛机械手包括机架、转台、大臂、小臂、法兰、第一直线驱动器、第二直线驱动器和第三直线驱动器。 所述转台通过第一转动副与机架联接,大臂通过第二转动副与转台联接,小臂通过第三转动副与大臂联接,法兰固结在小臂上,第一直线驱动器一端通过第一虎克铰与机架联接,第一直线驱动器另一端通过第一球铰与大臂联接,第二驱动器一端通过第二虎克铰与机架联接,第二驱动器另一端通过第二球铰与大臂联接,第三直线驱动器一端通过第四转动副与大臂联接,第三直线驱动器另一端通过第五转动副与小臂联接。 本实用新型的突出优点在于: 1、采用混联结构,杆件做成轻杆,机构重量轻、刚性好; 2、机械手惯量小、运动学与动力学性能好; 3、法兰上安装不同的末端执行器,本机构可应用到装配、焊接、激光、医用等领域。
六自由度脊柱手术导引器
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
一种六自由度脊柱手术导引器,包括支撑机构、定位机构以及六自由度并联姿态调整机构,所述六自由度并联姿态调整机构固定于定位机构上,所述六自由度并联姿态调整机构包括上平台、下平台、六个直线副、伸缩杆以及操作套筒,所述六个直线副以两个为一组沿上平台以及下平台均匀设置,每个直线副的上端通过一球形副与上平台连接,每个直线副的下端通过一球形副与下平台连接,所述伸缩杆与所述上平台固定,并向下倾斜延伸后与所述操作套筒连接。上述六自由度脊柱手术导引器,通过支撑机构来支撑姿态调整机构的重量,通过定位机构对人体脊柱的脊凸部分进行定位,由姿态调整机构对不同脊椎段的椎弓根钉道姿态和位置调整和定位,使钉道姿态和位置更精确,更安全可靠。
平面双滑块并联机构二自由度粘片机焊头结构及动作过程
成熟度:正在研发
技术类型:-
应用行业:制造业
技术简介
本发明公开了一种平面双滑块并联机构二自由度粘片机焊头结构及动作过程,该粘片机焊头结构的导轨安装固定在机架上,两个驱动单元分别驱动左右两个滑块沿导轨作往复直线移动,通过三组连杆使两个滑块同焊头座铰接起来,两滑块的移动合成焊头座在工作平面的曲线和直线运动,焊头座上安装有焊头吸嘴,完成焊头吸嘴在拾片点拾取晶片、传送晶片和在多个粘片点粘焊晶片的动作,并且具有多粘片点的粘焊功能,该焊头结构具有相对独立性,在一定的工作范围,通过改改变程序就能适用于不同粘片机的应用场合。
找到162项技术成果数据。
找技术 >平面两自由度双向可逆连杆式集装箱正面吊运起重机
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
摘要:本发明公开了一种平面两自由度双向可逆连杆式集装箱正面吊运起重机,包括车架,吊臂、吊臂转动机构和吊臂伸缩机构,其中,吊臂包括可伸缩连接的转动臂和伸缩臂,转动臂的臂体上安装有相对于其可滑动的滑块,伸缩臂远离转动臂的一端上安装夹紧装置;吊臂转动机构包括位于转动臂两侧且对称的两转动装置,转动装置包括依次铰接的前摇杆、后摇杆和连杆;吊臂伸缩机构包括位于吊臂两侧且对称设置的两伸缩装置,伸缩装置包括伸缩摇杆和伸缩连杆,伸缩摇杆下端与车架的中部铰连,上端与伸缩连杆的下端铰连,伸缩连杆的两端分别与伸缩臂和伸缩摇杆铰连。本起重起机在控制维护和保养成本的同时,消除了起重机的冗余行车路线,其输出轨迹灵活多变。
一种具有五自由度的塑件抓取机械手
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
本发明提供了一种具有五自由度的塑件抓取机械手,所述塑件抓取机械手包括机身、机械臂和机械手,所述机械臂包括主臂和副臂,所述主臂包括由受力板、保持架和连接架,构成具有水平移动自由度的一平面框架,所述副臂包括副臂杆、滑块导轨和副臂气缸,具有竖直方向移动的自由度;所述机身包括底座和机械臂支撑架,所述机械臂支撑架上设有摇杆机构;所述机械手包括抓取机构和腕部回转气缸,所述腕部回转气缸带动所述夹头相对所述机械臂旋转,使所述机械手具有第二旋转自由度。本发明提供的一种具有五自由度的塑件抓取机械手,质量轻,装配精度高,注塑取件过程中能够准确抓取塑件,工作稳定。
一种五自由度外骨骼式上肢康复机器人
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
p 摘要:本发明公开了一种五自由度外骨骼式上肢康复机器人,包括上肩关节旋转组件、上臂旋转组件、肘关节屈伸组件、前臂旋转组件、腕关节屈伸组件、手臂整体旋转组件和手臂整体高度调节箱;上肩关节旋转组件与上臂旋转组件连接;上臂旋转组件与肘关节屈伸组件连接;肘关节屈伸组件与前臂旋转组件连接;前臂旋转组件与腕关节屈伸组件连接;手臂整体旋转组件与上肩关节旋转组件连接;手臂整体旋转组件固定在手臂整体高度调节箱上。该机器人能够实现肩关节的旋转、上臂的内旋外旋、肘关节的屈伸、前臂的内旋外旋和腕关节的屈伸五个自由度的运动以及手臂竖直方向高度调整一个自由度的运动,提高康复运动的科学性、灵活性、有效性。 /p
一种仿人机器人的躯体机构
成熟度:正在研发
技术类型:实用新型
应用行业:交通运输、仓储和邮政业
技术简介
摘要:本实用新型公开了一种仿人机器人的躯体机构,包括一个带1自由度颈部的5自由度头部、两条3自由度手臂、1自由度腰部、两条6自由度腿;5自由度头部用来支持双目立体视觉,每只眼睛均具有2自由度;1自由度颈部能够绕垂直轴转动;每条3自由度手臂的每个肩关节均有2个自由度,每条手臂的肘关节处均有1个自由度;腰部有1个自由度,使得仿人机器人的上身能够绕竖直方向即Z轴在水平面上左右转动躯干;每条6个自由度腿的脚踝处均有2个自由度,每条腿的膝盖均有1个自由度,每个髋部均有3个自由度。本实用新型所述仿人机器人的躯体机构及其自由度不仅能够满足仿人机器人的作业要求,而且能减少仿人机器人的控制复杂度,以及提高仿人机器人的控制精度。
一种用于重型构件运输和安装的六自由度重载车辆
成熟度:正在研发
技术类型:发明
应用行业:制造业
技术简介
摘要:本发明公开一种用于重型构件运输和安装的六自由度重载车辆,包括U型车架和托架平台,托架平台设于U型车架上,U型车架底部设有行走轮机构,托架平台上设有Y轴平移机构和XZ平面旋转机构,托架平移与U型车架之间设有Z轴平移机构,U型车架上设有X轴平移机构、XY平面旋转机构和YZ平面旋转机构。本六自由度重载车辆不仅能在狭窄的空间内进行多方向运输,还能在X轴平移、Y轴平移、Z轴平移、俯仰角度、旋转角度和翻滚角度多维微调的情况下进行精确定位安装,相比于该类传统运输车,能够实现更迅速更准确的多角度运输,避免倒车判定,行车轨迹的考虑,极大提高了桥梁运输效率,缩短运输时间,社会效益明显。
完全重力平衡的6自由度串联式主手机器人
成熟度:正在研发
技术类型:-
应用行业:制造业
技术简介
p 成果与项目的背景及主要用途:近二十年来,机器人技术发展非常迅速,各种用途的机器人在各个领域广泛获 得应用。但我国在机器人的研究和应用方面与工业化国家相比还有一定的差距, 因此研究和设计各种用途的机器人特别是工业机器人、推广机器人的应用是很有 现实意义的。在工业机器人的实际应用中,串联机器人应用最为普遍,已经广泛的 应用于生产中的机械加工、焊接、热处理、表面涂覆、上下料、装配等作业。技术原理与工艺流程简介:一种完全重力平衡的6自由度串联式主手机器人:分别固定在基座上的第一 关节驱动电机和第一关节轴;第一关节丝盘,通过回转副可旋转的连接在第一关 节轴的下端,所述的第一关节驱动电机的输出轴通过传动丝连接第一关节丝盘;两个吊架,分别固定连接在第一关节丝盘底部端面上的两侧;大臂关节轴,该大 臂关节轴的两端部分别对称的固定在所述的两个吊架下端部;第二、三关节丝盘, 该第二、三关节丝盘的回转中心固定连接在大臂关节轴上;平行四边形驱动机构, 该平行四边形驱动机构可旋转的连接在大臂关节轴上,且底部连接腕部机构。本 项目能够实现6自由度力感机器人的完全重力平衡,满足力雅克比方程成立条件, 使主手机器人具有良好的静态透明性,提高力感精度。应用前景分析及效益预测:全球工业机器人需求量保持在一个很高的水平,主要应用在汽车整车、汽车 零部件、电子电气和化工、橡胶和塑料等领域,占比高达60%。根据国际机器人 联合会(IFR)统计,国际机器人市场于2010年开始恢复性增长,其中工业机器 人在2011年的全球市场销量为16.6万台,销售额255亿美元。2011年中国工业 机器人销量达22600万台,位居世界工业机器人销量排名第三位,仅次于日本、 韩国。据IFR估计,中国未来的工业机器人市场年需求量约为100万台,将成为 世界最大的工业机器人市场。该六自由度串联机器人,可应用在焊接、搬运与装 卸、涂漆、表面处理、切割等多个领域,应用前景巨大。应用领域:焊接、搬运与装卸、涂漆、表面处理、切割等行业技术转化条件(包括:原料、设备、厂房面积的要求及投资规模):按需要可购置国产设备或国外设备、厂房面积1500〜5000m2、具体厂房面积 和投资规模可视企业的情况和产品的批量规模而定。合作方式及条件:合作方式可采取技术转让或协商。 /p
微创全膝关节置换手术机器人
成熟度:-
技术类型:-
应用行业:制造业
技术简介
项目简介: 项目针对术前、术中、术后全周期的 MIS-TKA 机器人综合解决 方案,突破柔顺 7 自由度机械臂与精细操作 2 自由度末端执行器,个 性化虚拟导板以及安全手术操控技术,基于图像配准的增强现实手术 导航技术,术中下肢力线定量检测与修正、以及个性化术后评估技术; 研制出具有术前规划、术中导航与机器人操控、术后评估、以及安全 保障的专科型 MIS-TKA 机器人样机系统,建立 MIS-TKA 机器人手 术流程规范与安全、有效性评估体系。 项目特色: 膝关节损伤是骨科学的主要组成部分,且由于其周围毗邻重要神 经、血管,不恰当的手术操作往往会导致严重后果。微创全膝关节置 换技术手术创伤小,术后恢复快,深受患者好评。但该技术严重限制了手术切口,手术视野小、操作空间窄、骨性标志显露差对医生提出 了更高的要求。本项目从微创全膝关节置换手术外科临床出发,针对 术前、术中、术后三个阶段提出智能化、机器人化手术方案,将微创 精准 TKA 手术提升到智能化水平,推动 TKA 机器人手术技术、TKA 导航技术、TKA 术前规划和术后评估技术、以及智能化手术系统集 成技术的进一步发展,为后续临床验证、产品化奠定坚实的技术基础。 已取得的成果: 已成功研制出脊柱微创手术机器人系统,并开展临床试验(如下图)。
一种三自由度混联码垛机械手
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
介绍 一种三自由度混联码垛机械手,包括机架、转台、大臂、小臂、法兰、第一直线驱动器、第二直线驱动器和第三直线驱动器。所述机架、转台、大臂、第一直线驱动器和第二直线驱动器联接成一个两自由度的并联机构。所述法兰和小臂串联在大臂上,并由联接在大臂上的第三直线驱动器驱动运动。本实用新型结构简单,机构自身运动质量轻、刚性好、惯性小、动力学性能好,与同类产品相比具有负载能力强的特点。 将具有高刚度、高精度、高负载能力的并联机构引入码垛机械手的设计之中,采用2-UPS/U并联机构实现码垛机械手大臂摆转与俯仰运动,在大臂上串联一个小臂,此构型能有效解决现有串联码垛机械手误差累积、刚度差的问题。 正文 技术领域 本实用新型涉及工业机器人领域,特别是一种三自由度混联码垛机械手。 背景技术 码垛机器人广泛应用于机床上下料、冲压机自动化生产线、自动装配流水线、搬运码垛、集装箱等的自动搬运作业当中。现有的码垛机器人主要有直角坐标型、圆柱坐标型以及关节型等结构类型。其中关节型码垛机器人因其机构紧凑、动作灵活、占地面积小、工作空间大等优点,已逐步成为码垛机器人最主要的结构形式。但这类传统开链式串联结构的码垛机器人的驱动电机都需要安装在关节处,导致机器人手臂重量大、刚性差、惯量大、关节误差累积等问题,机构动力学性能较差,难以满足高速重载搬运码垛的要求。并联机构是一种动平台和定平台通过至少两个独立的运动链相连接,有两个或两个以上自由度,且以并联方式驱动的机构。因其具有精度高、结构紧凑、刚度高、承载能力强等优点,引起了国内外众多专家学者的关注,相关研究取得了丰硕的成果,在运动模拟器、并联机床、微操作机器人等方面取得了较好的应用。但并联机构也存在工作空间小的缺点,因此很难满足实际码垛的需求。本实用新型采用混联结构实现机器人码垛运动,能解决传统开链结构误差累计大、刚性差和并联机构工作空间小的问题。 发明内容 本实用新型的目的在于提供一种三自由度混联码垛机械手,可有效提高现有码垛机械手的负载能力。 本实用新型通过以下技术方案达到上述目的:一种三自由度混联码垛机械手包括机架、转台、大臂、小臂、法兰、第一直线驱动器、第二直线驱动器和第三直线驱动器。 所述转台通过第一转动副与机架联接,大臂通过第二转动副与转台联接,小臂通过第三转动副与大臂联接,法兰固结在小臂上,第一直线驱动器一端通过第一虎克铰与机架联接,第一直线驱动器另一端通过第一球铰与大臂联接,第二驱动器一端通过第二虎克铰与机架联接,第二驱动器另一端通过第二球铰与大臂联接,第三直线驱动器一端通过第四转动副与大臂联接,第三直线驱动器另一端通过第五转动副与小臂联接。 本实用新型的突出优点在于: 1、采用混联结构,杆件做成轻杆,机构重量轻、刚性好; 2、机械手惯量小、运动学与动力学性能好; 3、法兰上安装不同的末端执行器,本机构可应用到装配、焊接、激光、医用等领域。
六自由度脊柱手术导引器
成熟度:正在研发
技术类型:实用新型
应用行业:制造业
技术简介
一种六自由度脊柱手术导引器,包括支撑机构、定位机构以及六自由度并联姿态调整机构,所述六自由度并联姿态调整机构固定于定位机构上,所述六自由度并联姿态调整机构包括上平台、下平台、六个直线副、伸缩杆以及操作套筒,所述六个直线副以两个为一组沿上平台以及下平台均匀设置,每个直线副的上端通过一球形副与上平台连接,每个直线副的下端通过一球形副与下平台连接,所述伸缩杆与所述上平台固定,并向下倾斜延伸后与所述操作套筒连接。上述六自由度脊柱手术导引器,通过支撑机构来支撑姿态调整机构的重量,通过定位机构对人体脊柱的脊凸部分进行定位,由姿态调整机构对不同脊椎段的椎弓根钉道姿态和位置调整和定位,使钉道姿态和位置更精确,更安全可靠。
平面双滑块并联机构二自由度粘片机焊头结构及动作过程
成熟度:正在研发
技术类型:-
应用行业:制造业
技术简介
本发明公开了一种平面双滑块并联机构二自由度粘片机焊头结构及动作过程,该粘片机焊头结构的导轨安装固定在机架上,两个驱动单元分别驱动左右两个滑块沿导轨作往复直线移动,通过三组连杆使两个滑块同焊头座铰接起来,两滑块的移动合成焊头座在工作平面的曲线和直线运动,焊头座上安装有焊头吸嘴,完成焊头吸嘴在拾片点拾取晶片、传送晶片和在多个粘片点粘焊晶片的动作,并且具有多粘片点的粘焊功能,该焊头结构具有相对独立性,在一定的工作范围,通过改改变程序就能适用于不同粘片机的应用场合。